Año 22 Número 84 – Marzo 2024
Innovación en la medición de superficies de radiotelescopios: un enfoque práctico y accesible
Por Hugo Command
Este artículo describe una innovación significativa en la medición de la superficie de un reflector de radiotelescopio, empleando un brazo robotizado con movimiento horizontal y otro de inclinación, un medidor de distancia láser, y un sensor MPU6050. Este enfoque se utilizó para medir y posteriormente optimizar la superficie reflectora de un radiotelescopio destinado al proyecto MIA (Multipurpose Interferometric Array) [1].
Introducción
Los radiotelescopios son pilares fundamentales en el estudio del cosmos. Un componente esencial en su diseño es la precisión de la superficie de su reflector, cuya importancia radica en su capacidad para reflejar ondas de radio hacia el punto focal con la mayor exactitud posible. Las irregularidades en esta superficie pueden causar distorsiones significativas en los datos recogidos, afectando la calidad y la precisión de las observaciones astronómicas.
A lo largo de la historia, lograr una precisión en la superficie de los reflectores de radiotelescopios ha representado un desafío continuo, abordado mediante una variedad de métodos y tecnologías. La integridad de estas superficies puede verse comprometida por factores tales como errores de fabricación, deformaciones gravitacionales cuando el reflector se inclina, distorsiones térmicas por calor solar y flexiones causadas por vientos fuertes. Estas imperfecciones impactan negativamente en la eficiencia del reflector, siendo particularmente críticas en longitudes de onda cortas, donde la precisión es esencial. Se mide la precisión de un reflector en términos de las desviaciones cuadráticas medias (rms) respecto a una parábola ideal, denominadas δz y δx, en direcciones paralelas y perpendiculares al eje óptico, respectivamente. Estas desviaciones resultan en variaciones en la longitud del camino óptico hacia el foco para diferentes partes del reflector, como se muestra en la Figura 1.
Identificar y corregir tales defectos es una tarea que requiere métodos muy precisos. Los radioastrónomos han empleado diversas técnicas para caracterizar cuantitativamente las superficies de las antenas parabólicas y revelar regiones de la superficie reflectante que podrían necesitar ajustes mecánicos para lograr un rendimiento óptimo de la antena. Entre estas técnicas se encuentran la holografía de microondas [2], la fotogrametría óptica [3] y la medición de distancia utilizando medidores láser [4].
Nuestro enfoque innovador, que combina la impresión 3D, la robótica y la computación de bajo costo, se inserta en este rico historial como una alternativa económica y altamente adaptable, manteniendo la precisión necesaria para observaciones fiables en radioastronomía [5].
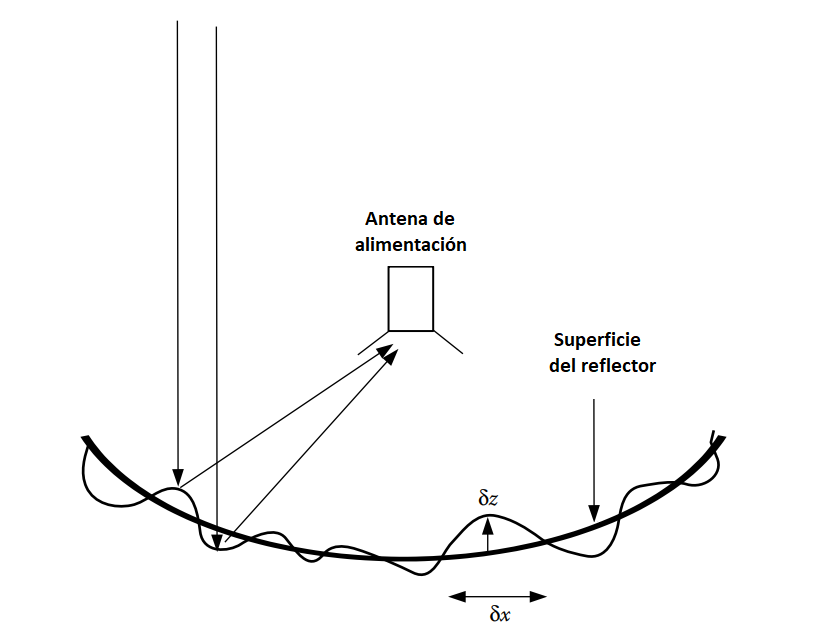
Figura 1. Las irregularidades de la superficie del reflector provocan desviaciones de una parábola perfecta con valores rms δz y δx en las direcciones paralelas y perpendiculares al eje óptico, respectivamente.
Desarrollo del Instrumento
En el ámbito de la radioastronomía, la precisión de la superficie de los reflectores de radiotelescopios es fundamental para su eficacia. Tradicionalmente, la medición y mapeo de estas superficies requieren el uso de hardware especializado y costoso, lo que implica una inversión significativa tanto en equipamiento como en operación y mantenimiento.
En contraste, el instrumento que hemos desarrollado para este proyecto representa una alternativa notablemente más asequible y personalizable, sin sacrificar significativamente la precisión requerida para nuestras aplicaciones específicas. La clave de esta innovación radica en el uso de tecnologías emergentes y accesibles:
Impresión 3D para el Brazo Robotizado: Reemplazamos el hardware comercial con un brazo robotizado construido mediante impresión 3D. Esta tecnología nos permitió diseñar y fabricar un sistema mecánico a medida, que se adapta perfectamente a nuestras necesidades específicas, ofreciendo una flexibilidad que no está disponible en las soluciones comerciales.
Servomotores SG-5010 y Driver PCA9685: Para el movimiento pan (horizontal) y tilt (inclinación) del brazo, se incorporaron dos servomotores SG-5010 [6], controlados por un controlador PCA9685 [7]. Esta combinación proporciona un movimiento preciso, esencial para el mapeo detallado de la superficie del reflector.
Distanciómetro Láser para Medición de Precisión: Un componente clave de nuestro sistema es el distanciómetro láser JRT 512A 40m de alta precisión [8]. Este sensor láser, especializado en mediciones de corto alcance, es esencial para medir con exactitud la distancia entre el brazo robot y la superficie reflectora del radiotelescopio. Con una capacidad de medición de hasta 40 metros y una interfaz USB para la transmisión de datos, este dispositivo es vital para obtener mediciones precisas y confiables de la superficie del reflector, contribuyendo así a la precisión general del sistema de medición.
Inclinómetro MPU6050 para Medición de Ángulos: Un aspecto fundamental en nuestro sistema es el uso del inclinómetro MPU6050. Este sensor es crucial para medir los ángulos de inclinación pan y tilt del brazo robotizado. Es importante destacar que el ángulo principal utilizado para los cálculos de los puntos medidos en el reflector es el ángulo roll, que coincide con el ángulo tilt. Este ángulo proporciona una medición precisa y confiable para nuestros propósitos. Por otro lado, el ángulo pan, que coincide con el ángulo yaw del sensor, presenta una deriva y por lo tanto no se utiliza como un dato preciso en nuestros cálculos. En su lugar, el ángulo pan se determina aproximadamente a través del ángulo programado en el servomotor que controla este movimiento.
Raspberry Pi 4B en Modo ‘Headless’: El cerebro del sistema es una Raspberry Pi 4B [9], utilizada en modo ‘headless’ (sin necesidad de monitor, teclado o mouse conectados directamente). Esta computadora compacta pero potente ejecuta el software necesario para recopilar datos de los sensores y controlar los movimientos del brazo robotizado. La Raspberry Pi, por su bajo costo y alta versatilidad, ofrece una solución de computación eficiente y accesible.
Cámara Raspberry Pi para Monitoreo Visual: Para complementar los datos sensoriales, se integró una cámara Raspberry Pi que permite un monitoreo visual del proceso [10]. Esto ayuda a verificar y ajustar la orientación y posición del brazo y del sensor en tiempo real, proporcionando una capa adicional de precisión y control.
Con este enfoque, se ha logrado una solución que reduce drásticamente los costos asociados con los métodos tradicionales de medición de superficies de reflectores de radiotelescopios, sin comprometer la calidad y la precisión de los datos recolectados. Este desarrollo no solo es un avance significativo en términos de costos y accesibilidad, sino que también demuestra la viabilidad de tecnologías emergentes en aplicaciones científicas de alto nivel.
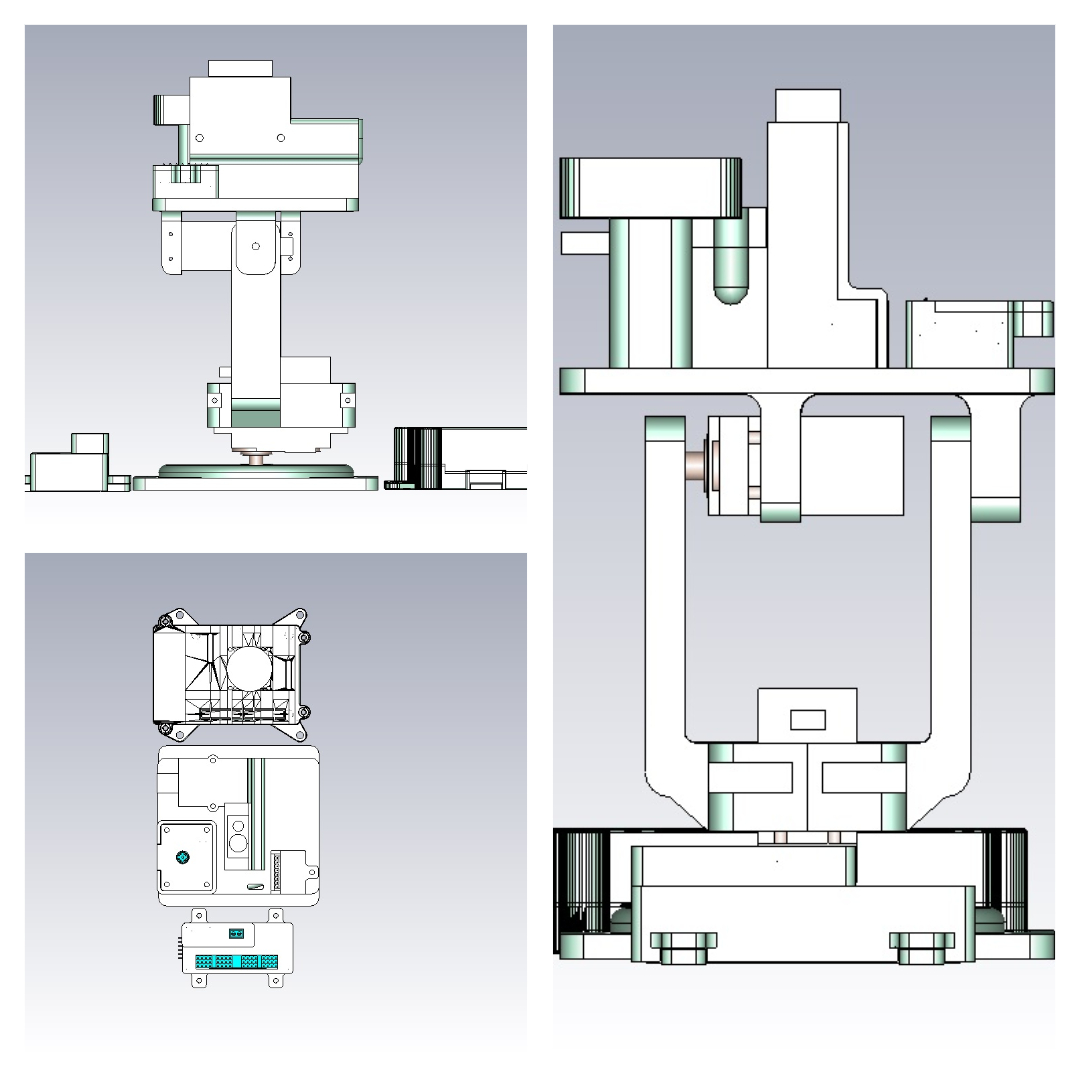
En la Figura 2 se aprecia el modelo diseñado mediante CAD para su posterior impresión en 3D y ensamble.
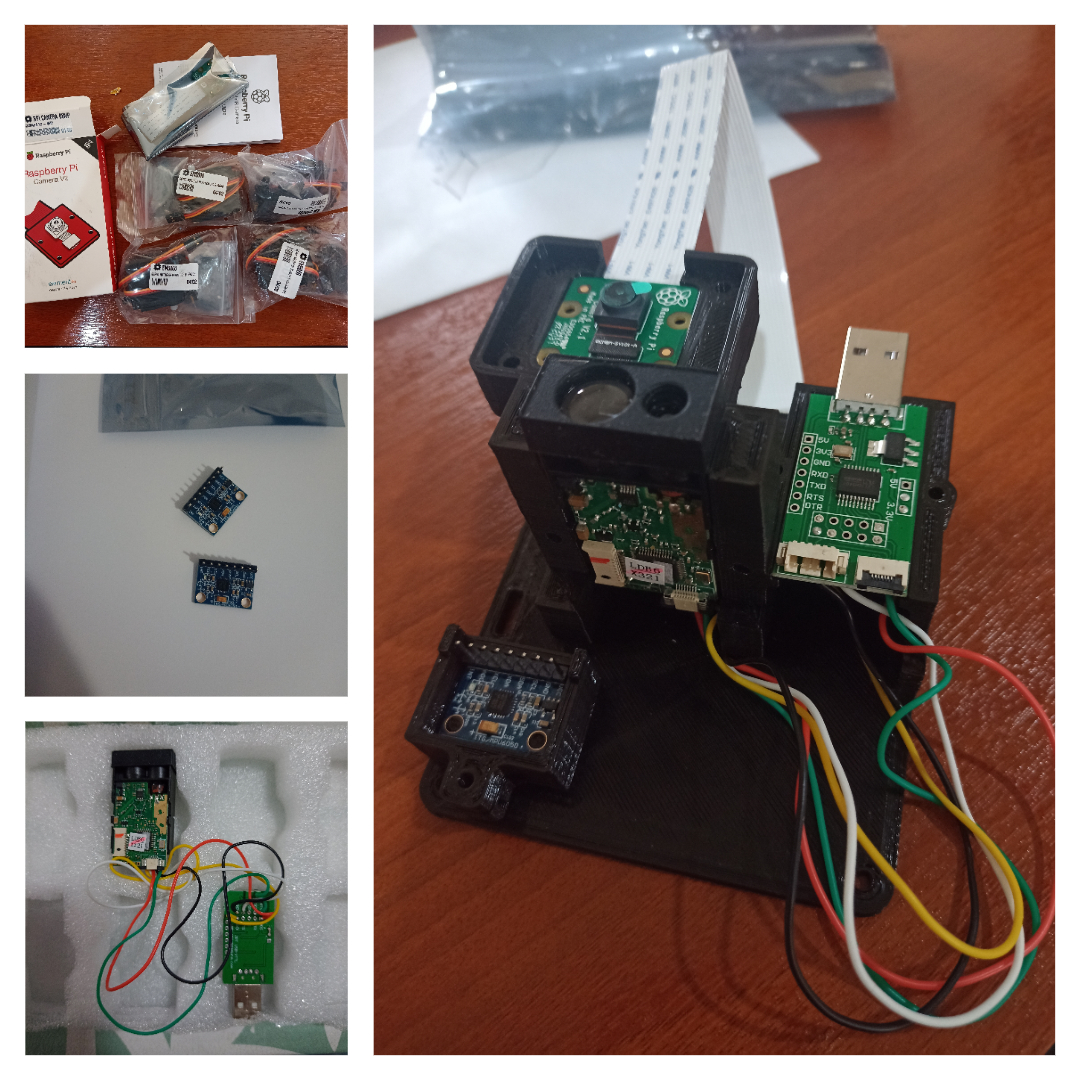
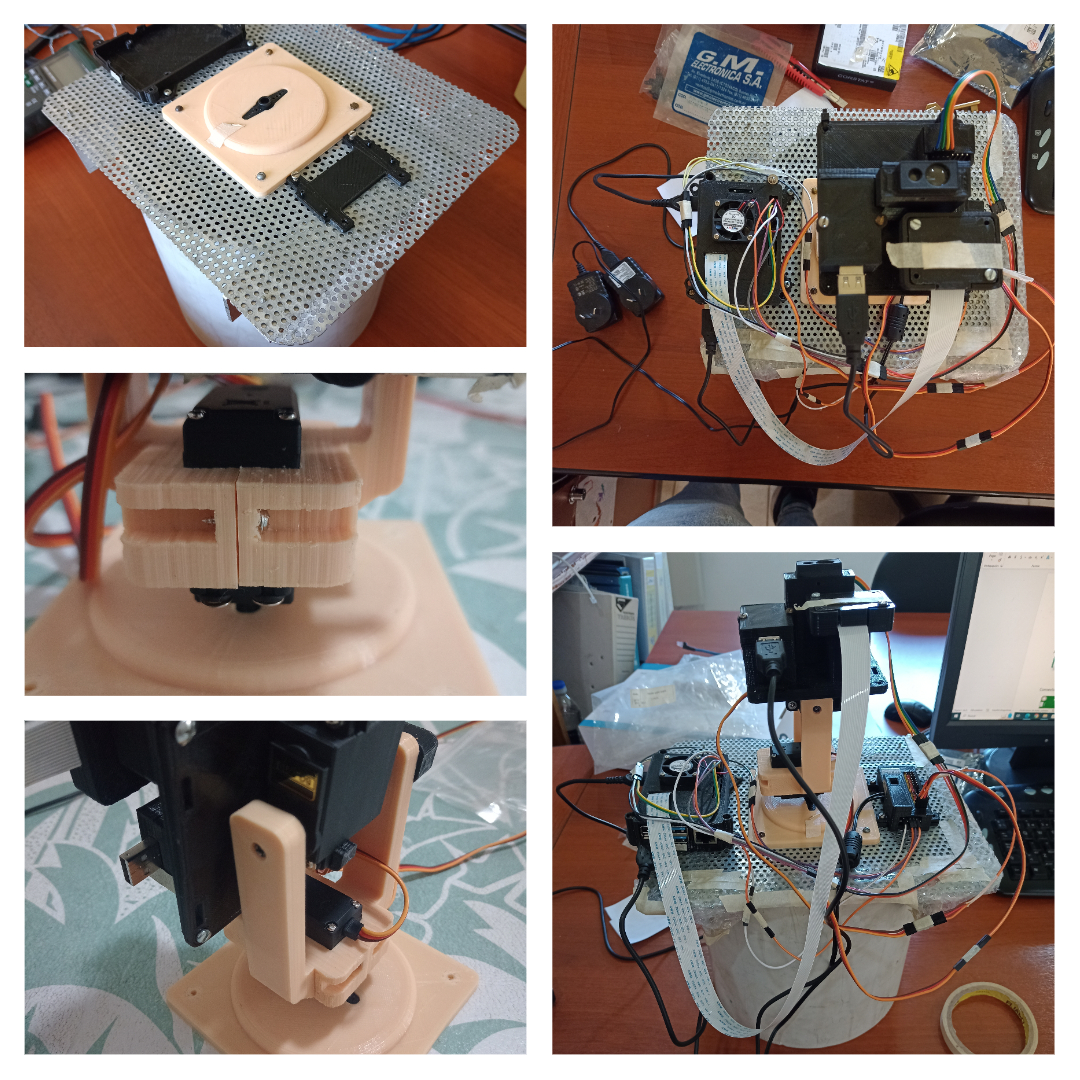
La Figura 3 muestra el modelo terminado y las partes principales del instrumento.
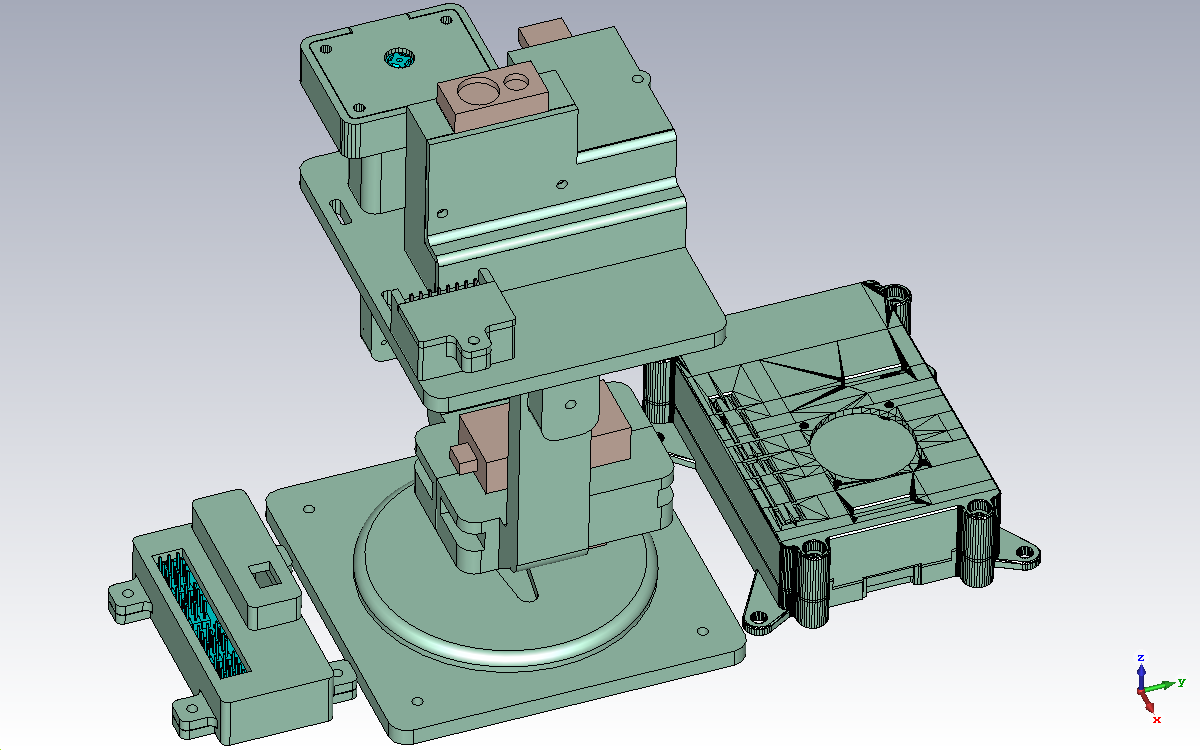
Figura 2. Diseño del brazo robot y cajas para la Raspberry Pi y el driver PCA9685 para su posterior impresión en 3D.
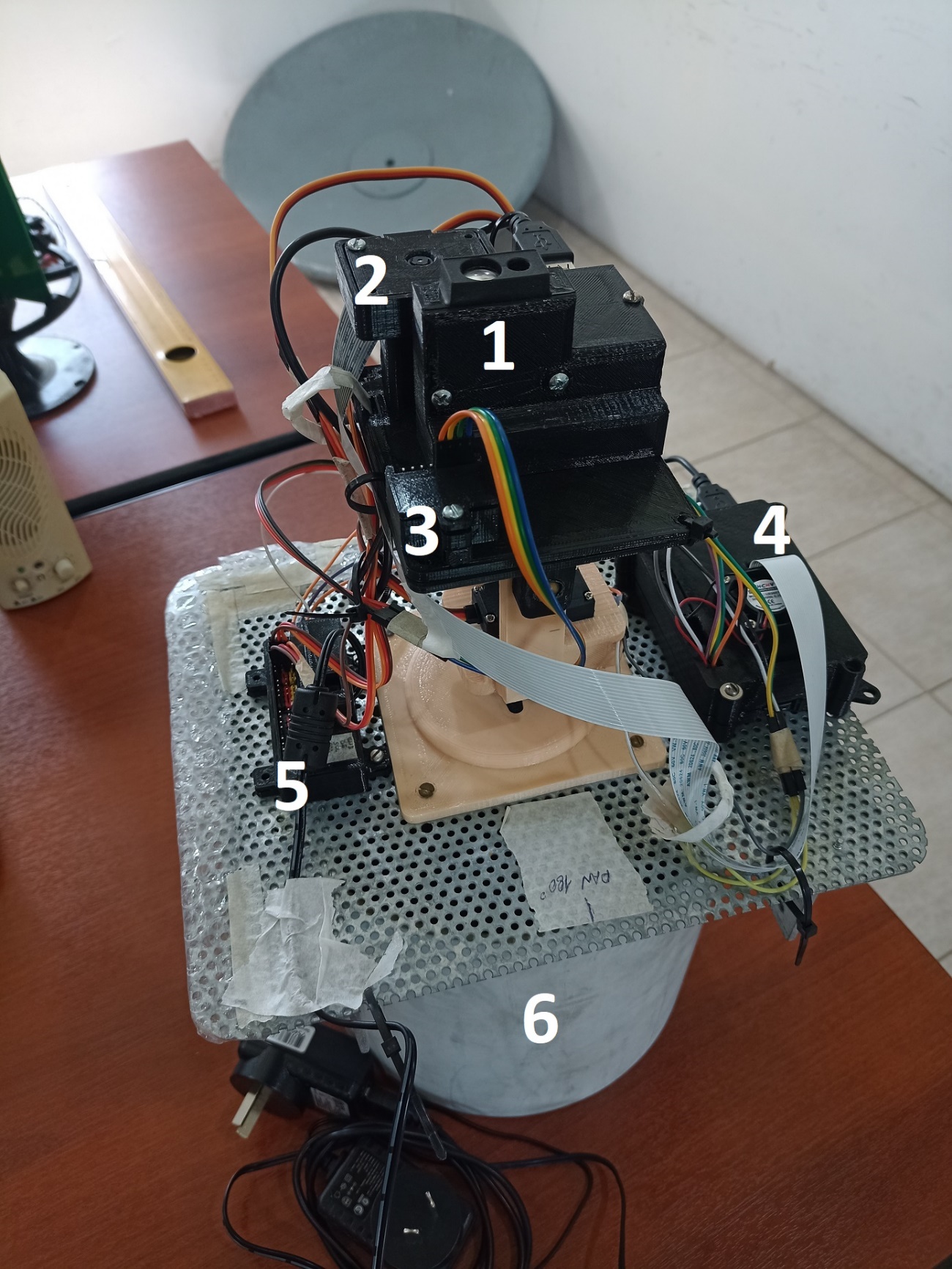
Figura 3. Modelo terminado del brazo robot para la medición de la superficie del reflector para el proyecto MIA.
Los componentes del brazo robot se pueden enumerar de la siguiente manera:
1. Medidor de distancia laser.
2. Cámara Raspberry Pi
3. Inclinómetro MPU-6050
4. Raspberry Pi 4B
5. Controlador de servomotores PCA9685
6. Interfaz mecánica para la ubicación y fijación en el soporte del reflector.
Procedimiento de Medición
El procedimiento de medición se basa en un método de tres pasos. La metodología consiste en:
1er paso. Medición de Distancias y ángulos: Inicialmente, se miden las distancias desde el punto focal del radiotelescopio o desde otro punto fijo de referencia hasta múltiples puntos en la superficie del reflector. Para ello, se utiliza el medidor de distancia láser montado en la torreta robótica con movimiento pan/tilt conectada a una computadora Raspberry Pi 4B. El barrido se realiza de manera radial. En cada paso del ángulo horizontal, se toman varios pasos de ángulos de inclinación. Estos pasos de inclinación determinan la cantidad de puntos que se recogen de la superficie a estudiar. De esta manera, se forma una nube de puntos que representa la superficie relevada del objeto de estudio Figura 4. La superficie reflectora está compuesta por una malla metálica con un espaciado de 1 cm entre los alambres. Para permitir las lecturas del medidor de distancia láser, los tramos donde se tomaron las medidas de distancia se cubrieron con cinta reflectante, ver Figura 5. La torreta está fijada a una plataforma plana perforada, que a su vez está unida a un tubo de PVC de 20 cm de diámetro. Este tubo puede ser introducido en el sistema de soporte del reflector de MIA, como se muestra en la Figura 6. La Raspberry Pi controla la torreta, el telémetro láser y el sensor inclinómetro MPU6050. La comunicación remota con una computadora en la sala de control del telescopio se realiza a través de una conexión wifi, lo que permite la recopilación y análisis de datos en tiempo real.
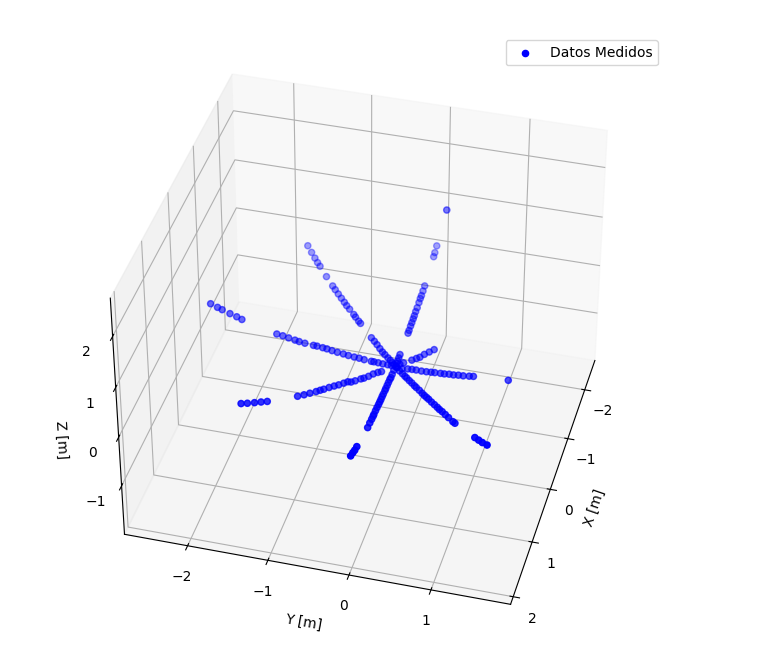
Figura 4. Composición en 3D de los puntos medidos de la superficie del reflector usando el instrumento.

Figura 5. Superficie del reflector MIA con cintas reflectantes.
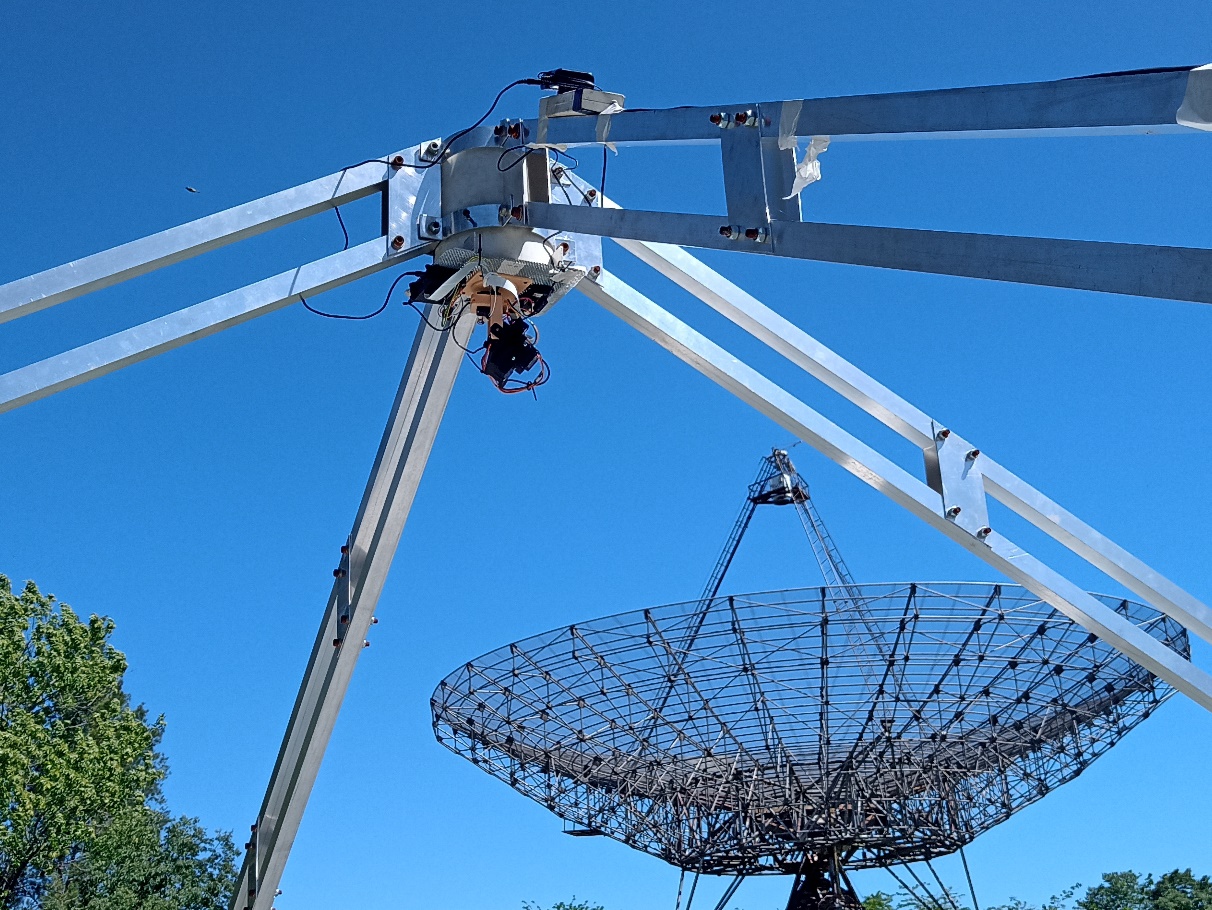
Figura 6. Brazo robot ubicado en el soporte del reflector MIA.
2do paso. Determinación de una Superficie de Referencia Paraboloide: Los puntos medidos se utilizan para definir una superficie de referencia paraboloide que describe la curvatura media del plato. Se traducen las coordenadas de los puntos medidos al sistema de coordenadas x, y, z ortogonales para comparar directamente los componentes z de los puntos medidos con los de la superficie de referencia. Desviaciones en los componentes z indican dónde y cuánto se desvía la superficie del plato respecto a la superficie de referencia. La Figura 7 muestra de forma gráfica la relación entre los elementos de los dos sistemas de coordenadas. El punto P sobre la superficie reflectora puede ser representada tanto por P(θ, φ, r) como por P(x, y, z), donde las coordenadas θ, φ, r se definen de la siguiente manera:
θ = ángulo de inclinación del brazo robot
φ = ángulo horizontal del brazo robot
r = distancia medida por el brazo robot
Las expresiones que relacionan los elementos de ambos sistemas coordenados son:
x = rz sen (φ)
y = rz cos(φ)
rz = r sen(θ)
z = d – r cos(θ)
d = r cos (θ) cuando el ángulo θ vale cero
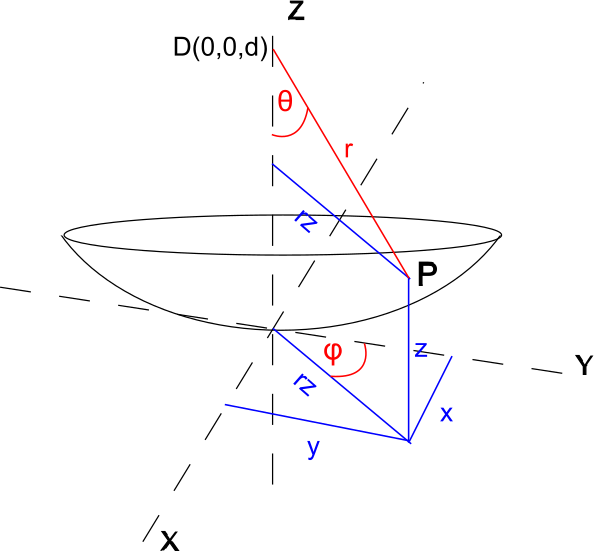
Figura 7. En el diagrama se ve la relación entre las coordenadas θ, φ y r en rojo y las coordenadas x, y, z en azul para un punto P sobre la superficie del reflector. El punto D es un punto sobre el vértice de la superficie paraboloide sobre el cual se producen los movimientos horizontales y de inclinación del brazo robot medidor de distancia
3er paso. Cálculo de las Desviaciones: Finalmente, se calculan las desviaciones de la superficie del reflector con respecto a una superficie de referencia paraboloide. Esto se realiza utilizando programas de gráficos para crear un mapa de color 2D a partir de una lista de puntos, donde cada punto se especifica por coordenadas x, y, y z, representando las desviaciones. Esto permite identificar visualmente las áreas del plato que necesitan ajuste mecánico para mejorar el rendimiento del radiotelescopio.
La Figura 8 revela las desviaciones con respecto a la superficie de referencia para un determinado mapeo de la superficie utilizando el brazo robot medidor.
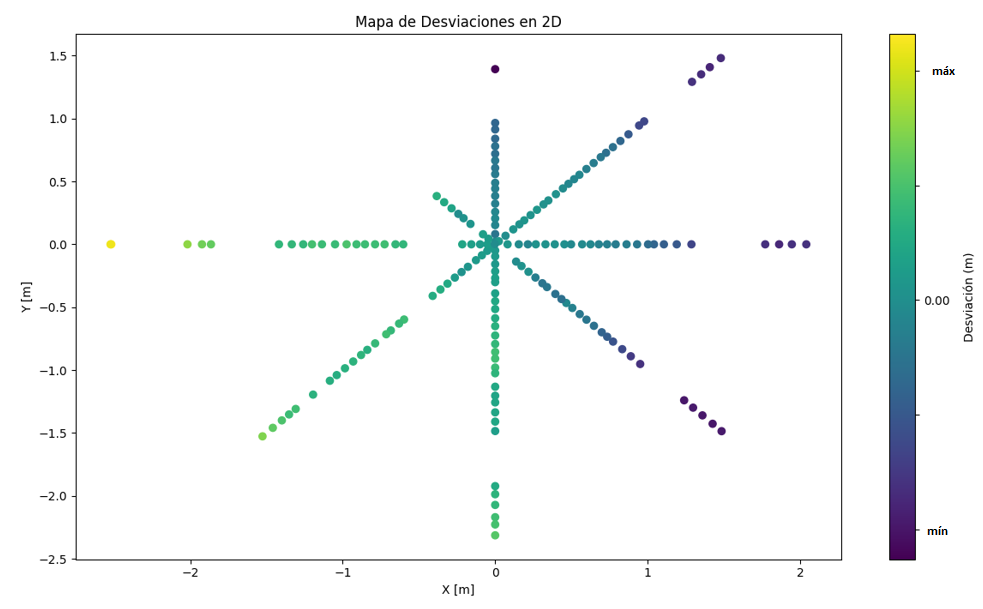
Figura 8. Imagen en 2-D que muestra las desviaciones de la superficie del reflector con respecto a la superficie de referencia.
Cada uno de estos pasos es fundamental para asegurar la precisión y eficacia de la superficie reflectora de los radiotelescopios en el proyecto MIA, permitiendo la detección y corrección de defectos menores en la superficie del reflector que podrían impactar negativamente su rendimiento, especialmente en frecuencias más altas.
Análisis y Resultados
La recolección de datos reveló desviaciones menores en la superficie del reflector. Estas desviaciones pueden ser críticas a frecuencias más altas, donde las imperfecciones pueden causar una pérdida de señal. Trabajos futuros determinaran el grado de un ajuste preciso en la superficie del reflector basados en los datos recolectados. Esto mejorará la precisión de la superficie y, como resultado, se esperan excelentes rendimientos de los radiotelescopios para el proyecto MIA.
Registro fotográfico
En esta sección, presentamos una serie de fotografías que documentan las diferentes etapas de nuestro trabajo en el proyecto.
Integrando las piezas al brazo robot

Pegando la superficie reflectante
Dibujo en CAD 3D para posterior impresión
Conformando el brazo robot
Conclusiones
Este proyecto demuestra que con herramientas relativamente accesibles y tecnologías emergentes como la impresión 3D y la computación de bajo costo, es posible realizar mediciones precisas y efectivas en aplicaciones de radioastronomía. Este enfoque no solo reduce significativamente los costos, sino que también aumenta la accesibilidad para instituciones con presupuestos limitados.
Agradecimientos
Quisiera expresar mi sincera gratitud a todos los que contribuyeron al desarrollo de este proyecto.
Guillermo Gancio por su confianza y apoyo para abordar el diseño y la construcción. Elias Fliger por las estrategias, discusiones sobre código, compras y facturación. Evelina Tarcetti y Marcos Borgetto por su apoyo en compras y facturación. Julián Galván por las estrategias sobre el barrido de puntos, postprocesamiento de los datos obtenidos. Eliseo Diaz por su asistencia en impresión 3D. Facundo Aquino y Juan Manuel González por la colocación de la cinta reflectante. Nahuel Duarte, Pablo Alarcón y Santiago Spagnolo por su colaboración en el movimiento del andamio, provisión de herramientas y asistencia mecánica.
Santiago Spagnolo también por la construcción de la de interfaz mecánica.
Daniel Perilli por su acompañamiento en el proyecto, protección de equipos, análisis de sensores. Augusto Donantueno por la facilitación de cable de conexión USB y soporte de red wifi.
Referencias
[1] Romero, G. E. … et al. (2023) The Multipurpose Interferometric Array and the development of its technological demonstrator https://arxiv.org/pdf/2309.16891.pdf[2] Rochblatt, David J. (199?) Microwave Antenna Holography”, 1992, IEEE Transactions on Microwave Theory and Techniques 40(6):1294 – 1300.
https://descanso.jpl.nasa.gov/monograph/series10/08_Reid_chapt8.pdf
[3] Shankar, N. Udaya … et al. (2009) Photogrammetry Measurements of a 12-metre Preloaded Parabolic Dish Antenna, National workshop on the Design of Antenna & Radar Systems (DARS), February 13-14. ISRO Telemetry Tracking and Command Network (ISTRAC) Bangalore, India.
https://arxiv.org/pdf/0905.1252.pdf
[4] Bryce, Edwin A. & Gallegos, Floyd H. (2006) Compact-Range Coordinate System Established Using a Laser Tracker, Sandia Report SAND2006-7541, Sandia National Laboratories.
https://digital.library.unt.edu/ark:/67531/metadc883768/m2/1/high_res_d/899721.pdf
[5] Martin, Joe. (2022) Three-Step Procedure to Measure Surface Accuracy of a Parabolic Dish Antenna , Espanola, NM 87532 1 March, Rev. 1
http://www.k5so.com/Three_step_procedure_to_measure_surface_accuracy_of_a_parabolic_dish_antenna.pdf
[6] Standard servo – TowerPro SG-5010
https://www.adafruit.com/product/155
[7] Tim’s PCA9685 Controller
https://www.instructables.com/Tims-PCA9685-Controller/
[8] JRT 512A 40m High Precision Laser Distance Sensor Short Range USB Laser Works
http://www.jrtsensor.com/sale-11867181-jrt-512a-40m-high-precision-laser-distance-sensor-short-range-usb-laser-works.html
[9] Raspberry Pi 4 Tech Specs
https://www.raspberrypi.com/products/raspberry-pi-4-model-b/specifications/
[10] Raspberry Pi Camera Module 2
https://www.raspberrypi.com/products/camera-module-v2/
Sobre el autor
Nací en la ciudad de Concordia, Entre Ríos, el 13 de marzo de 1978. Desde 1997, resido en la ciudad de La Plata, donde he formado mi familia. Soy esposo de Lorena González y padre de dos hijos, Morella y Milo. Me he formado en ingeniería electrónica de la Universidad Nacional de La Plata y también soy técnico en electromecánica, he dedicado mi carrera profesional a la ingeniería de radiofrecuencia y sistemas de antenas en el Instituto Argentino de Radioastronomía (IAR).Desde mi incorporación al IAR en 2004, he participado en el desarrollo de la radioastronomía y la tecnología observacional en Argentina, así como en diferentes proyectos de tranferencia tecnológica. Actualmente soy responsable del subsitema Front-End del proyecto MIA Pathfinder y he contribuido en el diseño y construcción del iluminador para el radiotelescopio de ese mismo proyecto. Tengo participación activa en el área de extensión del IAR para conectar a la comunidad con la ciencia radioastronómica.