Año 22 Número 86 – Septiembre 2024
Por Cesar F. Caiafa
“He snapped out mental orders to the distant power room,
the side of the vessel opened, and the scout ship was drawn within”
– E. E. Smith, Skylark of Valeron (1934).
La capacidad de controlar dispositivos a través del pensamiento ha sido imaginada por autores de ciencia ficción y científicos desde tiempos remotos. Sin embargo, no fue hasta hace unos pocos años que, con el avance de las neurociencias, la biotecnología y las ciencias de la computación, esta fascinante idea comenzó a hacerse realidad.
Las llamadas interfaces Cerebro-Máquina o Cerebro-Computadora (Brain Computer Interface – BCI en inglés) han mostrado grandes avances recientemente, abriendo un gran abanico de aplicaciones que van desde proveer medios de comunicación, locomoción e interacción con el mundo físico a personas paralizados; facilitar la rehabilitación motora en pacientes que han sufrido ataques cerebrovasculares; hasta su utilización en juegos recreativos y terapéuticos. En este artículo, repasamos la historia de esta incipiente tecnología, los avances logrados y los desafíos actuales.
El cerebro
Considerado el órgano más complejo, con un peso de aproximadamente 1.5Kg, el cerebro humano está compuesto por cerca de 100 mil millones de neuronas que, interconectadas, son responsables de coordinar desde nuestras funciones más elementales e involuntarias como la respiración, la presión sanguínea, la temperatura corporal, la ubicación en espacio-tiempo; hasta los procesos cognitivos más complejos como la toma de decisiones, el planeamiento, el razonamiento lógico abstracto y las emociones.
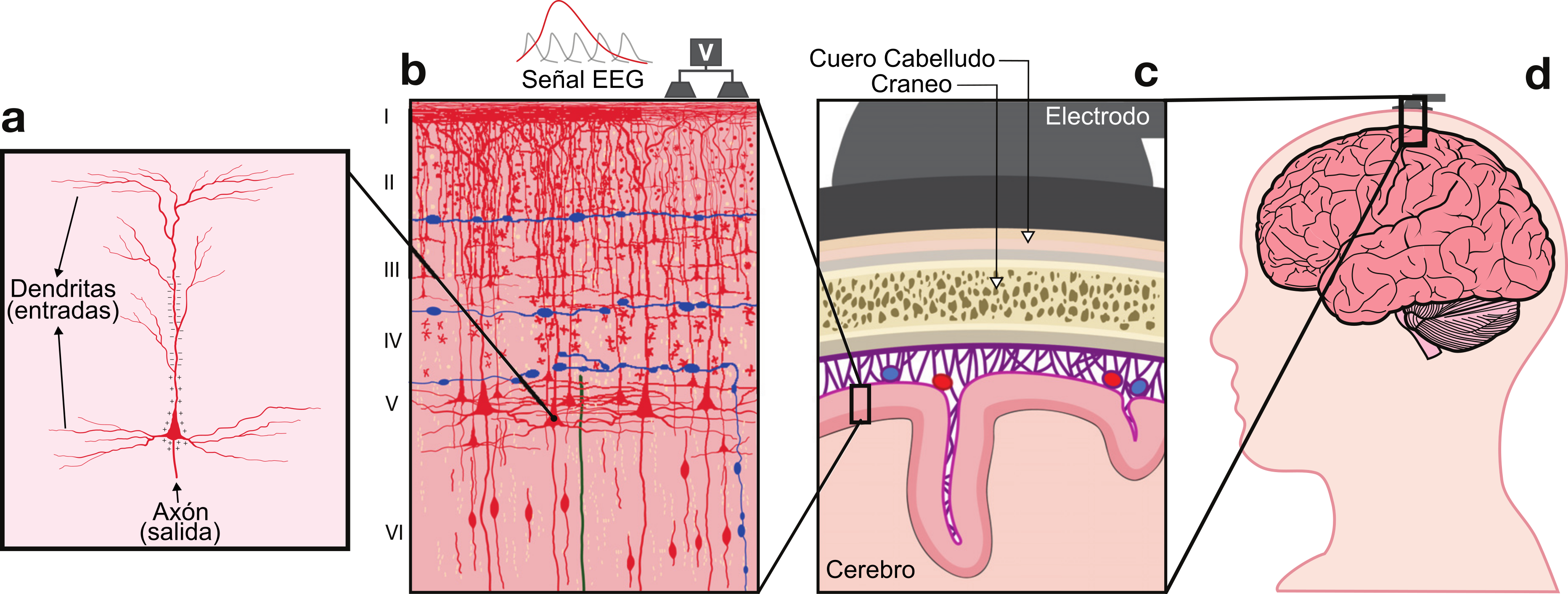
Figura 1: Origen neuro-fisiológico del EEG. (a) Neurona de tipo piramidal en cuyo axón se generan pulsos eléctricos como resultado del procesamiento de los pulsos recibidos en sus dendritas; (b) En la corteza cerebral, miles de neuronas se conectan conformando una intrincada red de señales sincronizadas que dan origen a una señal eléctrica (Electroencefalograma, EEG) que puede ser medida con electrodos; (c-d) La señal EEG puede ser medida a nivel de la corteza cerebral por medios invasivos o en la superficie del cuero cabelludo de manera no-invasiva. (Adaptación de Figura 2 en Portillo-Lara et al, 2021).
Las neuronas constituyen la unidad elemental de procesamiento de información en el cerebro (Fig. 1a-b), recibiendo en sus entradas (dendritas) secuencias de pulsos eléctricos (spikes) originadas en los axones (salidas) de otras neuronas conformando así una red compleja (Sporns, 2011). Se estima que, en el cerebro humano, una neurona del tipo piramidal establece en promedio alrededor de 7.000 conexiones sinápticas (Hawkins&Ahmad, 2016). La forma en que se interconectan las neuronas se va modificando con el tiempo por un proceso de plasticidad que hace que nuestro cerebro se adapte y pueda, por ejemplo, aprender nuevas habilidades.
Para poder estudiar el cerebro se han desarrollado técnicas de imágenes que permiten analizar in vivo los procesos que tienen lugar en él. Por ejemplo, para poder mapear las conexiones estructurales (Conectoma) se utilizan imágenes de resonancia magnética de difusión (difusion Magnetic Resonance Imaging – dMRI), permitiendo detectar la dirección en que vibran las moléculas de agua dentro de las fibras nerviosas en la materia blanca del cerebro (Fig. 2a). Por otro lado, para identificar las regiones de la corteza cerebral que se activan durante un proceso cognitivo, se utilizan estudios de resonancia magnética funcional (fMRI) detectando el consumo de oxígeno (Fig. 2b). Además, también podemos registrar la actividad eléctrica de las neuronas ya sea, invasivamente con electrodos implantados dentro del cráneo (Electrocorticografía – ECoG o registro intracortical), o bien no-invasivamente colocando electrodos sobre el cuero cabelludo (Electroencefalografía – EEG), como se ilustra en la Fig. 2c.
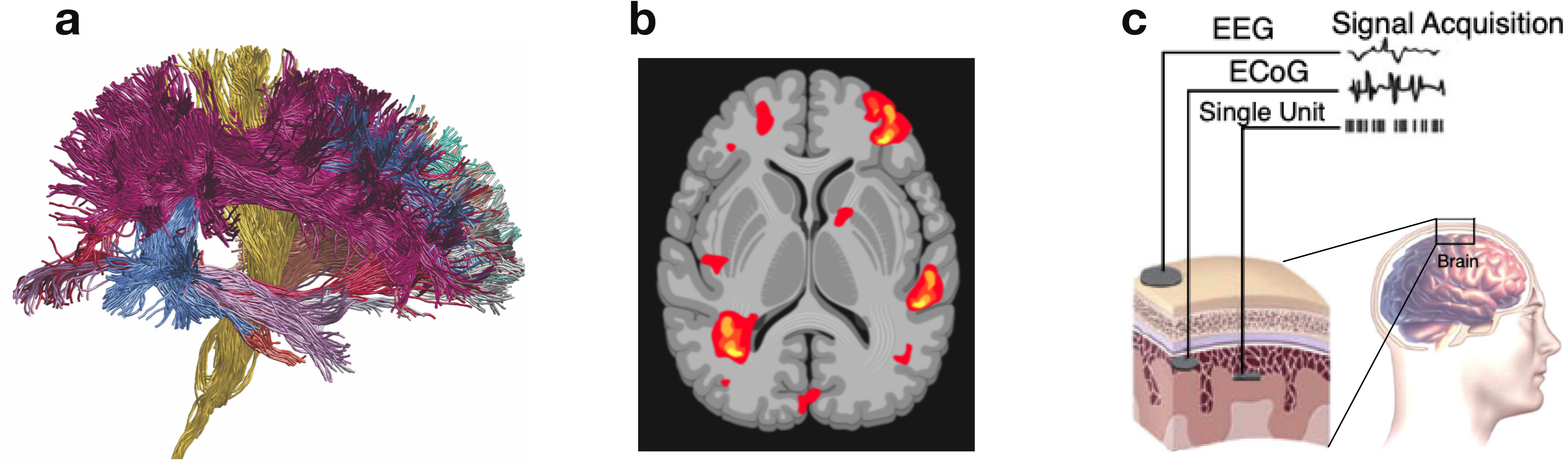
Figura 2: Técnicas para estudiar el funcionamiento del cerebro. (a) El Conectoma Humano puede obtenerse con equipos de resonancia magnética de difusión (dMRI). Imagen extraída de (Caiafa & Pestilli, 2017); (b) Con imágenes de resonancia magnética funcional (fMRI) es posible identificar las regiones de la corteza cerebral que se activan durante un período de tiempo (fuente1); (c) La actividad eléctrica de las neuronas puede ser medida de manera invasiva a través de electrodos implantados dentro de la corteza teniendo así acceso a las señales eléctricas de neuronas individuales (registro intracortical, single unit), o electrodos colocados sobre la corteza obteniendo un promedio local de las señales neuronales, técnica conocida como Electrocorticografía (EcoG). También es posible medir esta actividad eléctrica no-invasivamente con Electroencefalografía (EEG) con electrodos sobre el cuero cabelludo obteniendo señales menos limpias y más débiles comparada con los registros invasivos (imagen adaptada de (Kawala-Sterniuk et al., 2021)).
Los orígenes de la Electroencefalografía (EEG)
A principios del siglo XX, el neurólogo y psiquiatra alemán Hans Berger ya había registrado la actividad eléctrica espontánea en el cerebro de gatos y perros utilizando un electrómetro capilar de Lippmann. En 1924, llegó a registrar directamente los potenciales eléctricos en la corteza cerebral de un joven de 19 años usando un galvanómetro de Edelmann durante una operación de un tumor cerebral. Posteriormente, en los años 1920s también experimentó tomando registros con distintos tipos de electrodos sobre el cuero cabelludo utilizando un galvanómetro de Siemens (Fig. 3a) dando así inicio a la técnica de Electroencefalografía – EEG (Berger, 1929). En ese trabajo, Berger ya identificaba dos tipos de ondas cerebrales: las ondas alfa y beta. Las ondas alfa, con rango de frecuencias entre 8 – 12 Hertz, son más prominentes cuando un sujeto está en estado de relajación con los ojos cerrados y desaparecen cuando se abren los ojos. Las ondas beta, con rango de frecuencias entre 15 – 25 Hertz, están asociadas con un estado de alerta y concentración (Panigrahi, 2022; Nam, 2018).
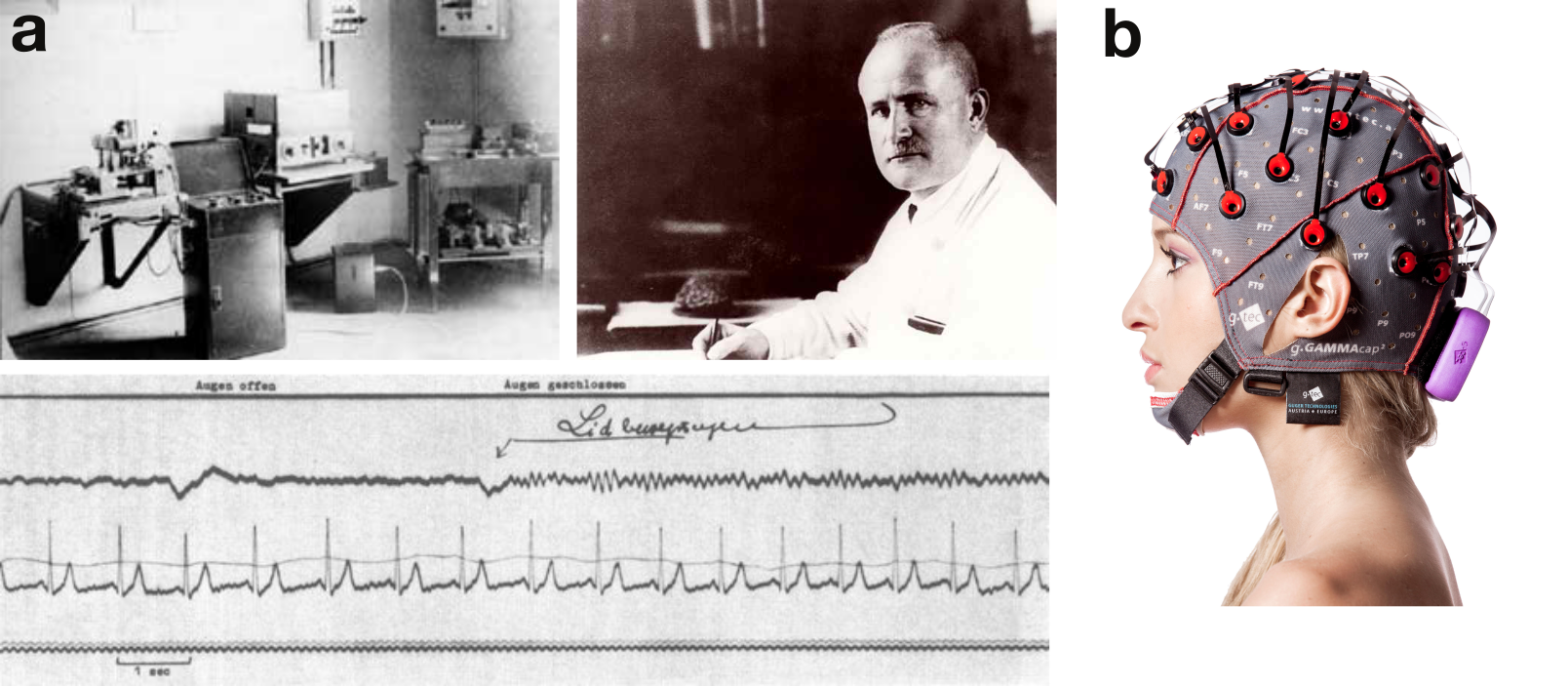
Figura 3: Evolución de la tecnología EEG.(a) Dr. Hans Berger (arriba-der.), equipo EEG con un solo canal utilizado en 1926 (arriba-izq., fuente 2) y registro EEG obtenido por H. Berger en 1928, un año antes de la publicación de su trabajo (Berger, 1929), donde se observe el cambio de frecuencia cuando el sujeto cierra los ojos (abajo, fuente3); (b) Equipo moderno portátil de EEG de 64 canales (fuente4)
Primeras aproximaciones a las interfaces Cerebro-Máquina
A partir de los descubrimientos de Berger, la electroencefalografía rápidamente demostró ser una herramienta valiosa, tanto para el diagnóstico de trastornos cerebrales como para el estudio de funciones cognitivas. Simultáneamente, la idea de utilizar las señales EEG como un canal de comunicación entre un sujeto y el mundo externo, empezaba a tomar forma.
En las décadas de 1950 y 1960, Joe Kamiya y sus colegas de la Universidad de Chicago descubrieron que una persona podía aprender a controlar voluntariamente la intensidad de sus ondas cerebrales, dando origen a la disciplina conocida como neurofeedback (Kamiya et al., 1968).
En 1973, el término Interfaz Cerebro-Computadora (Brain-Computer Interface – BCI en inglés) fue introducido por primera vez por Jacques J. Vidal, un investigador belga trabajando en la Universidad de California. En el artículo (Vidal, 1973), el autor propuso la idea de utilizar las señales eléctricas del cerebro para permitir a una persona controlar computadoras o prótesis. Sin embargo, no fue hasta los años 1980s que investigadores en Estados Unidos y Europa lograron llevar a la práctica estas ideas.
En 1988, Farwell y Donchin propusieron e implementaron el primer sistema BCI, denominado “P300 Speller”, que permitía a una persona deletrear texto. En este paradigma BCI se utiliza el pico en la señal EEG que ocurre aproximadamente 300 milisegundos después de la aparición de un estímulo esperado, conocido como potencial relacionado a un evento (Event-Related Potential, ERP) (Farwell & Donchin, 1988). En el “P300 Speller”, se presenta al usuario una cuadrícula de 6×6 caracteres en una pantalla, cuyas filas y columnas parpadean al azar una por vez (Fig. 4a). El usuario debe entonces concentrarse en un carácter específico por vez y contar mentalmente cuando éste parpadea. Estos eventos generan picos ERP en la señal EEG, permitiendo así identificar el carácter por su ubicación en fila y columna.
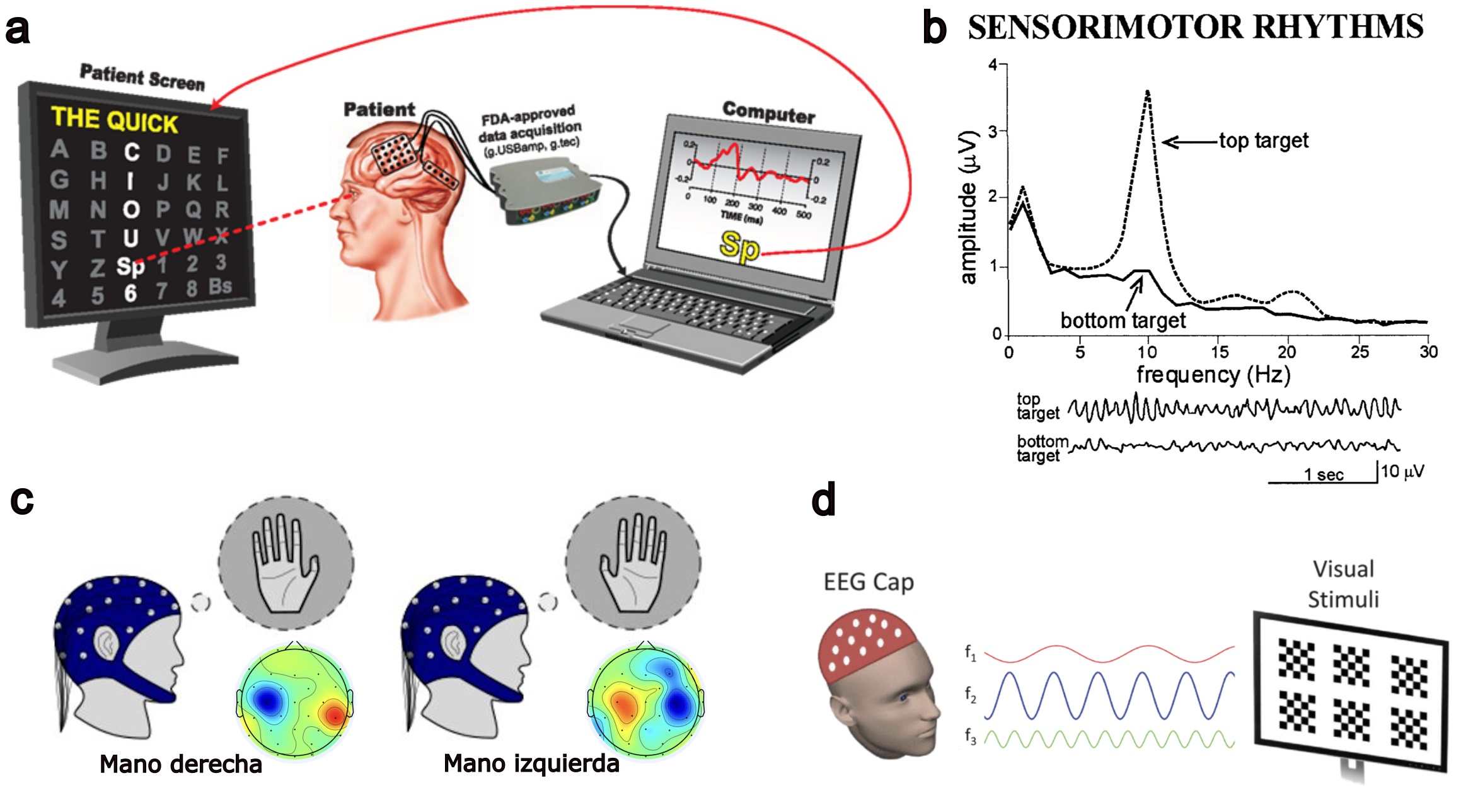
Figura 4: Paradigmas BCI. (a) P300 speller:el usuario se concentra en un carácter contando cada vez que éste parpadea, evento que puede ser detectado como un pico negativo en la señal eléctrica aproximadamente 300ms posteriores (imagen extraída de (Brunner et al., 2011)). (b) Control de cursor 1D por neurofeedback: el usuario aprende a controlar la amplitud de sus ondas mu (7 – 13 Hertz) del área sensorimotora (Wolpaw et al, 2002). (c) Imaginación Motora: el usuario imagina el movimiento de su mano derecha o izquierda lo que genera actividad en las áreas sensorimotoras correspondientes. Se muestran los filtros CSP (Common Spatial Patterns) obtenidos para cada comando utilizando un conjunto de datos de entrenamiento. (d) Paradigma SSVEP (Steady State Visually Evoked Potentials): en pantalla se presentan patrones, cada uno con una frecuencia de parpadeo distintiva. El usuario concentra su mirada en un patrón específico haciendo que su actividad neuronal se sincronice con la frecuencia del patrón elegido. Imagen adaptada de (Demir et al., 2019).
A principios de los años 90s, Jonathan Wolpaw y colegas en EEUU desarrollaron un sistema BCI que permitía al usuario controlar un cursor en una dimensión (Wolpaw et al, 1991). El principio de funcionamiento de este sistema se basaba en neurofeedback, requiriendo que el usuario se entrenara para aprender a controlar la amplitud de sus ondas cerebrales tipo mu (aproximadamente entre 7 – 13 Hertz) en el área sensoriomotora de la corteza cerebral. De esta manera, el sujeto lograba generar ondas con una amplitud baja para mover el cursor hacia abajo (bottom target), o alta para mover el cursor hacia arriba (top target) (Fig. 4b).
En 1993, el equipo de Gert Pfurtscheller en Austria propuso un nuevo paradigma llamado Imaginación Motora (Motor Imagery) que consiste en que el usuario imagine, por ejemplo, el movimiento de la mano derecha o izquierda, lo que produce una activación de las ondas cerebrales en las regiones de la corteza motora izquierda o derecha respectivamente (Fig. 4c) (Pfurtscheller et al. 1993).
A finales de la década de 1990 y principios del siglo XXI, surgieron nuevos paradigmas en las interfaces cerebro-computadora, impulsando un rápido crecimiento en el número de investigadores dedicados al desarrollo de esta tecnología. Un ejemplo notable es el paradigma de BCI basado en potenciales evocados por estímulos visuales, conocidos como SSVEPs (Steady State Visually Evoked Potentials, por sus siglas en inglés) (Silberstein et al., 1990). Este enfoque ganó gran popularidad en esa época. En este paradigma, el usuario fija su atención en uno de varios patrones visuales, cada uno de los cuales parpadea a una frecuencia distinta (Fig. 4d). Así, la señal EEG de la corteza visual se sincroniza con el estímulo externo, permitiendo asociar cada patrón en la señal EEG con un comando deseado. Aunque este paradigma tiene la desventaja de causar fatiga en el usuario, ha sido utilizado con éxito en diversas aplicaciones prácticas hasta la actualidad (Zhang et al., 2023).
Procesamiento de señales y el impacto de la Inteligencia Artificial (IA) en las BCIs
Un componente fundamental en los sistemas BCI es el algoritmo de procesamiento de la señal EEG, que permite interpretar la intención del sujeto a partir de sus ondas cerebrales. En algunos paradigmas, como el P300 (Fig. 2a) o en un BCI de dos comandos basado en neurofeedback (Fig. 2b), el algoritmo se reduce a la simple detección de niveles de señal por encima o por debajo de un umbral predefinido. En el paradigma basado en SSVEPs (Fig. 2d), la tarea del algoritmo también es relativamente sencilla, ya que consiste en detectar las frecuencias específicas de cada comando en la señal EEG, lo cual puede implementarse con técnicas clásicas de filtrado de Fourier.
Sin embargo, para otros paradigmas de BCI, como la Imaginación Motora (Fig. 2c), la detección de los patrones que permiten asociar la actividad cerebral con la intención del sujeto no es trivial y requiere algoritmos de aprendizaje automático. Estos algoritmos utilizan un conjunto de datos compuesto por las señales EEG y los comandos correspondientes elegidos por el usuario (datos de entrenamiento). De esta manera, se puede entrenar a un clasificador para identificar los patrones característicos de cada comando, personalizándolo, ya que los sujetos suelen presentar respuestas cerebrales diferentes entre sí. Es importante tener en cuenta que, durante esta etapa, no solo se entrena al clasificador, sino que también el sujeto aprende a generar mejores patrones cerebrales por efecto del neurofeedback.
El algoritmo de aprendizaje automático denominado Patrones Comunes Espaciales (Common Spatial Patterns – CSP) ha sido el «estándar de oro» durante muchos años desde que fuera propuesto por primera vez en el año 2000 (Ramoser et al., 2000). Este clasificador genera, para cada comando, un filtro espacial: un vector de coeficientes que determina cómo combinar las señales de los distintos electrodos. Esto se hace de manera que, en los datos de entrenamiento, se maximice la potencia de la señal del comando elegido y, al mismo tiempo, se minimice la potencia de las señales asociadas a los otros comandos. Estos filtros pueden representarse visualmente en un mapa de electrodos, mostrando los patrones EEG favorecidos para cada comando, como se ilustra en la Fig. 4c.
El clasificador CSP es lineal y ha demostrado ser muy efectivo, especialmente cuando se trabaja con un número reducido de comandos. No obstante, al aumentar la cantidad de comandos, los patrones en la señal EEG se vuelven más complejos, requiriendo clasificadores no lineales más sofisticados. Este problema se resolvió finalmente con la llegada de los algoritmos de Inteligencia Artificial (IA) basados en redes neuronales profundas, una disciplina conocida como Aprendizaje Profundo (Deep Learning), que floreció a principios de este siglo. Para los lectores interesados en profundizar en los algoritmos de IA, su historia y su gran impacto en la tecnología moderna, recomiendo el artículo “¿Qué es la Inteligencia Artificial?” publicado en el número 69 (2020) de este Boletín.
En el año 2018, se propuso una arquitectura de Aprendizaje Profundo basada en redes neuronales convolucionales llamada EEGNet que marcó un hito en la historia moderna de las interfaces Cerebro-Máquina (Lawhern et al., 2018). Este nuevo modelo entrenable, basado en IA, superó ampliamente la performance de los métodos clásicos y otros métodos con redes neuronales propuestos anteriormente. Este clasificador fue testeado con diversos conjuntos de datos y para diferentes paradigmas BCI (Lawhern et al., 2018). La Fig. 5a muestra la arquitectura de este clasificador.
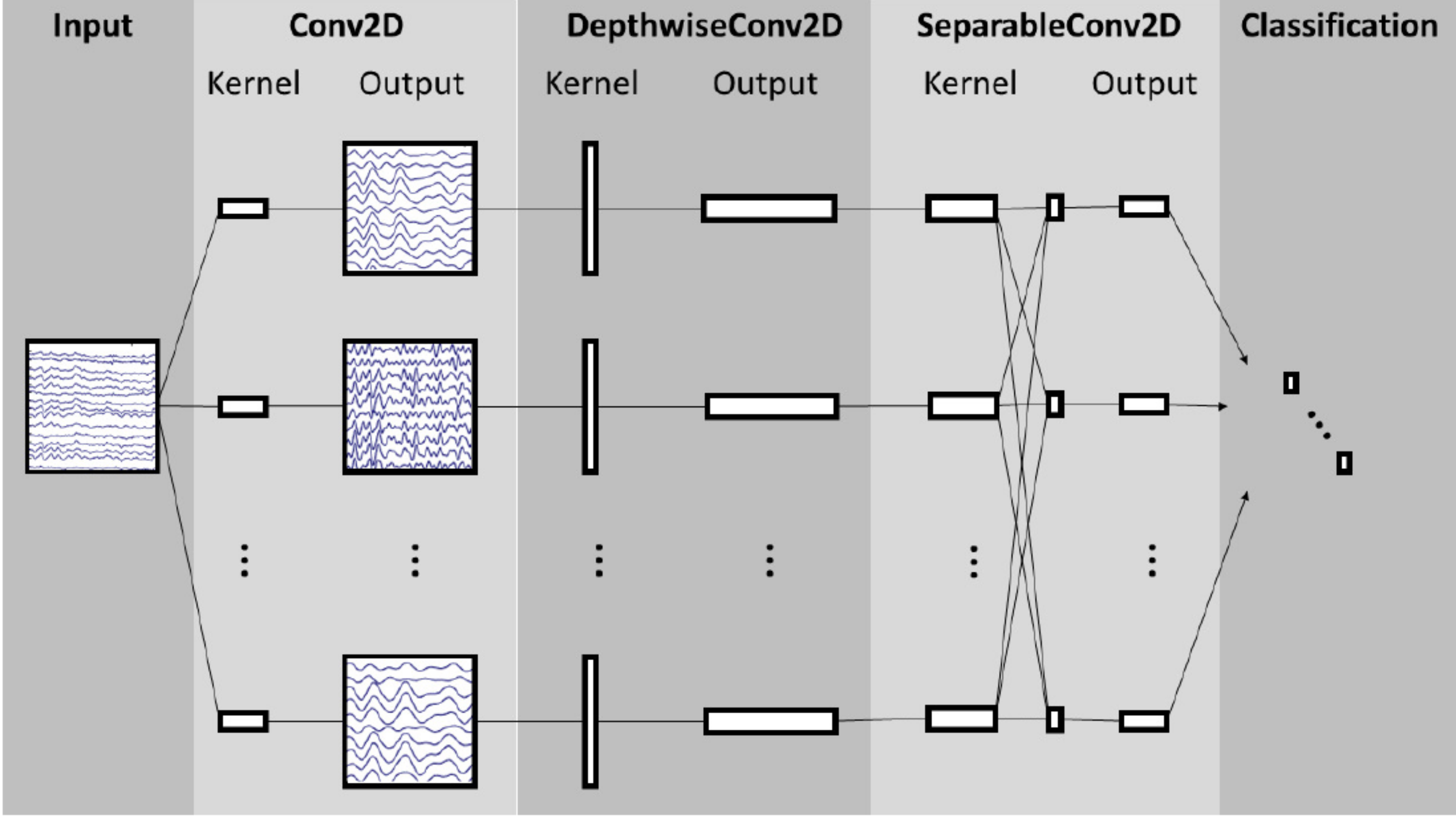
Figura 5: Clasificador de EEG para BCI basado en Aprendizaje Profundo. Arquitectura de la red neuronal EEGNet (Lawhern et al., 2018). El flujo del procesamiento de la señal EEG es de izquierda a derecha siendo la entrada las señales EEG multicanal y devolviendo en la salida las probabilidades de cada uno de los comandos. La red está compuesta por 3 capas ocultas convolucionales y una capa de salida densa. La primera capa (Conv2D Temporal) realiza convoluciones en el dominio temporal, permitiendo que la red aprenda las características temporales de la señal EEG. La capa siguiente, es una convolución en el dominio espacial, permitiendo que la red aprenda las relaciones entre distintos canales EEG. La tercera capa (SeparableConv2D) es una versión optimizada de una convolución estándar y contiene, a su vez una convolución profunda seguida por una convolución puntal, lo que permite reducir significativamente el número de parámetros del modelo.
Más recientemente, investigadores alemanes y chinos, tomaron de base la arquitectura EEGNet y, haciendo un estudio extensivo sobre numerosas bases de datos, optimizaron esa arquitectura hasta obtener un nuevo modelo de red neuronal, llamado EEGNeX, considerado como el estado-del-arte en clasificadores de EEG para aplicaciones de BCI (Chen et al., 2024).
Aplicaciones de las interfaces Cerebro-Máquina: avances recientes
La tecnología de las interfaces cerebro-máquina (BCIs) está en pleno florecimiento, con la participación de miles de investigadores de todo el mundo y el apoyo de grandes inversiones privadas de compañías como Meta5,Neuralink6, Synchron7, Motif Neurotech8, Paradromics9, Blackrock Neurotech10 y otras. A continuación, se describen algunos de los usos de las BCIs que han experimentado avances significativos en los últimos tiempos.
Técnicas invasivas para decodificación de información motora
En un artículo de 2006 en la revista Nature, un grupo de investigadores de la compañía Cyberkinetics en EEUU presentaron BrainGate, un sistema BCI para pacientes parapléjicos que les permitió, por primera vez, controlar un brazo robótico mediante su actividad neuronal registrada por una matriz de 10×10 microelectrodos (Fig. 6a) implantados en la corteza cerebral, específicamente en el área motora primaria (Hochberg et al., 2006). Este tipo de microelectrodos intracorticales proporciona una gran resolución espacial y temporal, logrando medir la actividad de neuronas individuales (single unit), es decir, registrando secuencias de pulsos (spikes) (Fig. 2c).
Quizás el lector haya accedido por los medios de comunicación a la noticia de marzo de 2024 sobre un paciente cuadripléjico de 29 años que pudo jugar ajedrez en línea gracias a un sistema BCI invasivo desarrollado por la compañía Neuralink11. En ese sistema se utilizó una matriz de 1024 microelectrodos.
Aunque los resultados preclínicos obtenidos son muy prometedores, la técnica intracortical es extremadamente invasiva y requiere calibraciones continuas para mantener la precisión de los comandos a lo largo del tiempo. Por esta razón, investigadores del instituto RIKEN Brain Science experimentaron con una técnica semi-invasiva en monos, utilizando un sistema BCI con electrodos de tipo ECoG (Fig. 6b-izq.) para predecir la posición del brazo de un animal durante un experimento (Fig. 6b-der.) (Chao et al., 2010). A diferencia de los electrodos intracorticales, que se insertan en la corteza, los electrodos ECoG se consideran semi-invasivos ya que se colocan sobre la superficie de la corteza, permitiendo el acceso a las señales provenientes de las neuronas cercanas.
En el artículo de Chao et al. (2010), la predicción de las coordenadas espaciales del brazo se logró aplicando el método estadístico clásico Partial Least Squares (PLS), utilizando como entrada una representación en tiempo y frecuencias de la señal ECoG obtenida mediante la transformada Wavelet. Posteriormente, en un trabajo en el que participó el autor del presente artículo, se desarrolló una versión del algoritmo PLS adaptada para entradas con formato tensorial, llamada High-Order PLS (HOPLS). Esta adaptación permitió obtener predictores con un menor número de parámetros, lo que resultó en mejores resultados en términos de precisión y costo computacional (Fig. 6c) (Zhao et al., 2013).
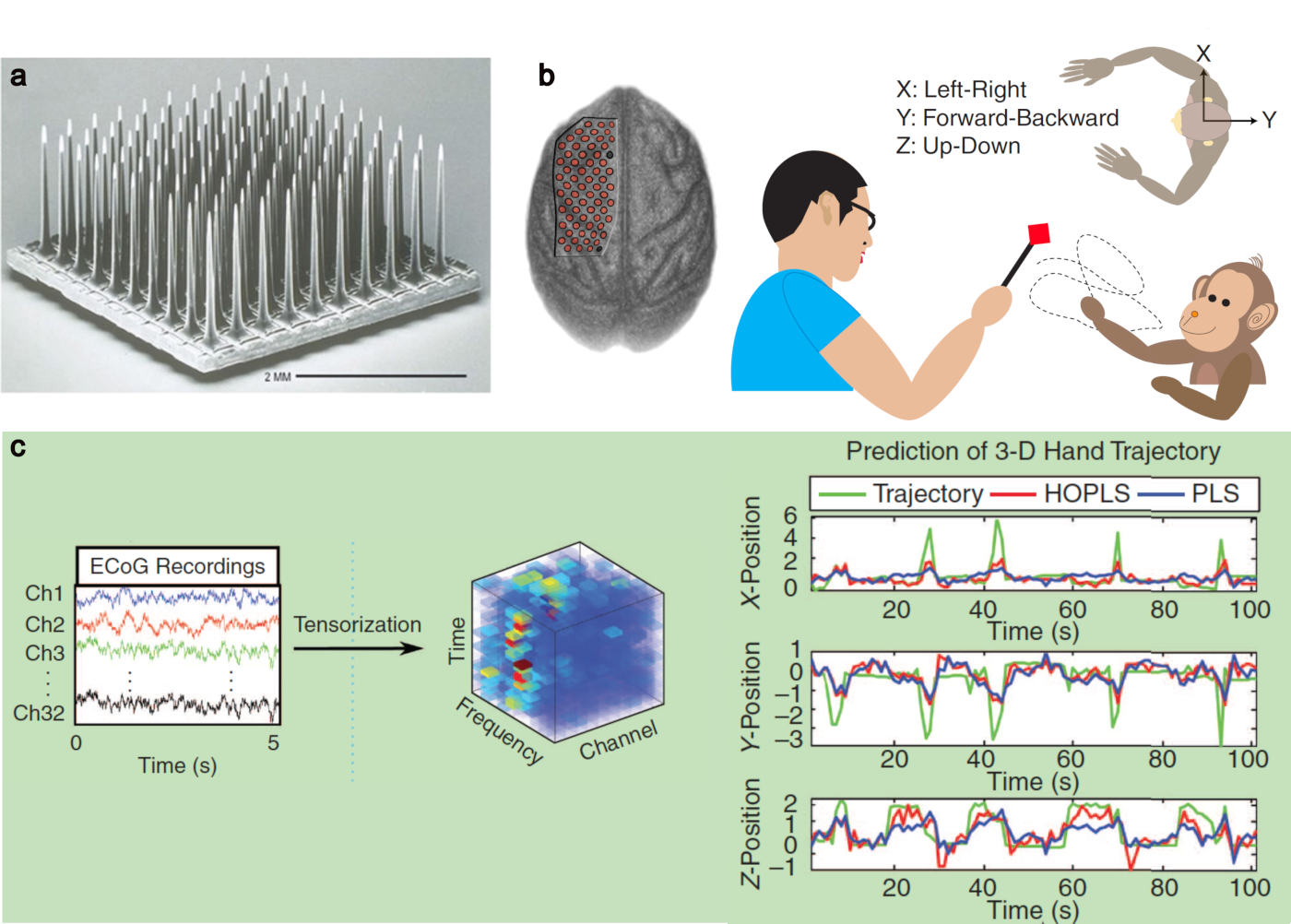
Figura 6: Técnicas invasivas para la decodificación de información motora. (a) Arreglo de 10×10 microeletrodos de silicio (Utah Electrode Array – UEA, fuente (Fernández et al., 2014)) utilizado en BrainGate para el control de un brazo robótico por pacientes cuadripléjicos. (b) Izquierda:ubicación de 64 electrodos ECoG en la superficie de la corteza cerebral de un mono; Derecha: Ilustración de una sesión de grabación de actividad neuronal del animal durante un experimento donde se le ofrece alimento en distintas ubicaciones espaciales. (c) Izquierda: Señal ECoG multicanal; Centro: Representación de la señal ECoG como un tensor 3D con dimensiones tiempo, frecuencia y canal, obtenido a través de la transformada Wavelet; Derecha: predicción de la trayectoria de la mano comparando el método PLS (Chao et al., 2010) con el método tensorial HOPLS propuesto en (Zhao et al., 2013) (imagen adaptada de (Cichocki et al., 2015)).
Comunicación del lenguaje mediante BCI invasivo
Otra de las aplicaciones de las BCIs para pacientes paralizados es la de proveer un canal de comunicación, como se ha demostrado desde hace varios años mediante paradigmas como el P300 (Fig. 4a) o el SSVEP (Fig. 4d) explicados anteriormente. Aunque la comunicación es posible, estos paradigmas presentan largos tiempos de decodificación del mensaje, ya que se construyen letra por letra, además de ser muy agotadores para el usuario, quien debe concentrar su mirada en patrones que parpadean.
Con el objetivo de lograr una comunicación más fluida, se han realizado avances significativos en la decodificación de palabras imaginadas utilizando microelectrodos intracorticales (invasivos). Este año, un grupo de investigadores estadounidenses descubrió que, con microelectrodos implantados en la corteza parietal posterior, específicamente en la región denominada Giro Supramarginal (SMG), es posible identificar palabras imaginadas o vocalizadas por los sujetos (Wandelt et al., 2024). Estudios previos con imágenes de resonancia magnética funcional (fMRI) habían indicado que la región SMG juega un rol importante en la representación interna del lenguaje. Aunque en estos estudios se trabajó con pocos sujetos y vocabularios muy reducidos, estos resultados alientan futuros desarrollos para decodificar la representación interna del lenguaje y desarrollar mejores interfaces cerebro-máquina.
Tecnología BCI no-invasiva basada en EEG
Las BCIs que utilizan electrodos implantados dentro del cráneo, ya sea dentro de la corteza o en su superficie, proporcionan señales neuronales limpias, con una gran resolución temporal y espacial, siendo muy eficientes para decodificar la información neuronal. Sin embargo, tienen la gran desventaja de ser métodos invasivos, ya que requieren una intervención quirúrgica compleja en la que se perfora el cráneo para acceder a la corteza cerebral, con todos los cuidados y riesgos que dicha operación implica.
Por otro lado, las señales EEG medidas en el cuero cabelludo capturan la actividad neuronal promedio de un gran número de neuronas y están contaminadas con distintos tipos de ruido que dificultan la decodificación de la información. Las fuentes de ruido presentes en EEG incluyen: (a) interferencias electromagnéticas del entorno; (b) señales eléctricas asociadas a la actividad muscular, como las producidas por los músculos oculares al pestañear o mover los ojos; (c) señal eléctrica cardíaca; y (d) falsos contactos, desadaptación de impedancia o desconexión de electrodos. A pesar de estas dificultades, se ha demostrado que, aplicando el procesamiento correcto de las señales, es posible decodificar la intención motora a partir de señales EEG, con la gran ventaja de ser dispositivos no invasivos. En este caso, el usuario debe imaginar, por ejemplo, el movimiento de su mano derecha o izquierda, lo cual produce patrones EEG distintivos. Además, a través de un proceso de neurofeedback, el usuario puede entrenarse para generar patrones cada vez más precisos. Este paradigma, denominado Imaginación Motora, está ilustrado en la Fig. 4c y ha sido implementado y evaluado satisfactoriamente para controlar una silla de ruedas en siete sujetos en (Yu et al., 2018).
Por otro lado, recientemente se investigó la posibilidad de detectar no invasivamente, a través de EEG, distintos tipos de movimientos en los miembros superiores en personas con daño en la médula espinal (Ofner et al., 2019). En ese estudio, diez pacientes participaron en un experimento donde se registraron sus señales EEG mientras realizaban cinco tipos de movimientos: pronación, supinación, agarre palmar, agarre lateral y apertura de mano (Fig. 7a-b). Se demostró empíricamente que estos movimientos son detectables en las señales EEG. Más recientemente, el autor de este artículo colaboró en el desarrollo e implementación de nuevos algoritmos de aprendizaje automático para la clasificación de diferentes movimientos de miembros superiores (Jia et al., 2023; Jia et al., 2024).
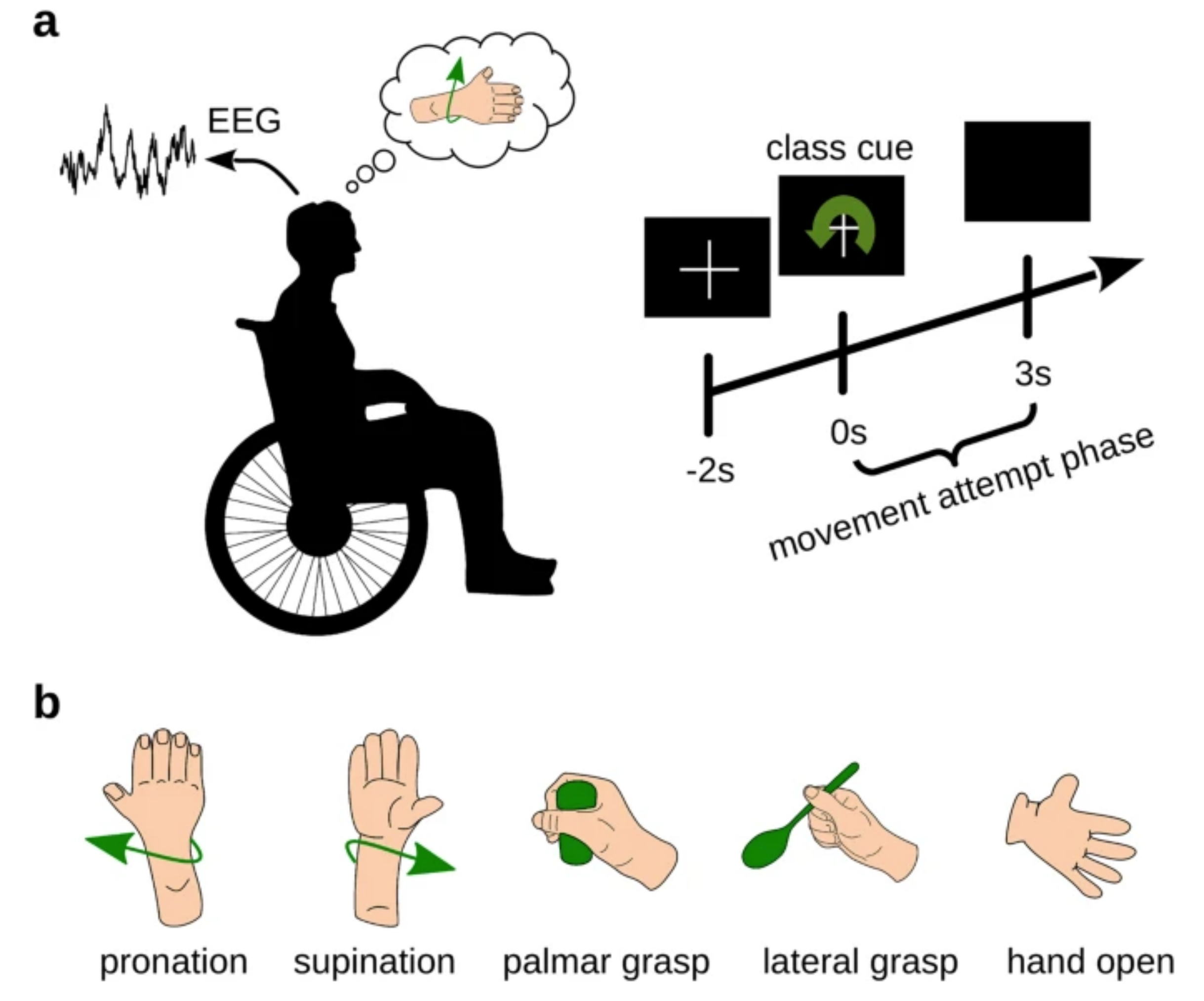
Figura 7: Clasificación de diferentes tipos de movimiento a través de EEG (figura extraída de Ofner et al., 2019) (a) Protocolo del experimento: se registran las señales EEG de diez pacientes con lesión de médula espinal mientras imaginan cinco tipos de movimientos en uno de sus miembros superiores. (b) Los cinco tipos de movimiento evaluados son: pronación, supinación, agarre palmar, agarre lateral y apertura de mano.
Neurorrehabilitación de la función motora
Una aplicación médica de las BCIs que ha mostrado importantes avances recientemente es su utilización para acelerar la recuperación de capacidades motoras en pacientes que han sufrido un Accidente Cerebrovascular (ACV). Es bien conocido que los pacientes con lesiones cerebrales, cuya consecuencia es la pérdida de capacidades motoras, muchas veces pueden recuperarlas parcialmente gracias a la plasticidad del cerebro mediante una terapia de rehabilitación, durante la cual nuevos circuitos cerebrales reemplazan las funciones de los circuitos dañados. En una terapia de rehabilitación típica, el paciente debe imaginar movimientos específicos y recibe asistencia externa para completar esos movimientos. Recientemente, se ha demostrado que, a través del monitoreo de las señales EEG del paciente durante la terapia de rehabilitación, el paciente logra una realimentación positiva sólo cuando genera los patrones cerebrales de movimiento correctos, reduciendo considerablemente la duración de las terapias (Pichiorri et al., 2015). La compañía europea g.tec, líder mundial en tecnología EEG ha desarrollado su producto RecoveriX12 para la asistencia por BCI a la rehabilitación motora de miembros superiores e inferiores en pacientes que han sufrido ACVs.
En el paradigma de Imaginación Motora clásico (Fig. 4c), el patrón EEG es detectado una vez que se produce el movimiento, sin embargo, existe una actividad cerebral previa al movimiento conocida como potencial cortical relacionado al movimiento (movement-related cortical potential – MRCP) que puede detectarse y puede ayudar a fortalecer la retro-alimentación en una terapia de rehabilitación. Recientemente, se han hecho estudios y propuesto nuevos algoritmos para detectar estos patrones MRCP (pre-movimiento) (McFarland et al., 2015; Jia et al., 2022).
Otras aplicaciones
En las secciones anteriores, se han descrito los usos y aplicaciones más relevantes de las BCIs desarrolladas hasta el momento. Sin embargo, hay otras aplicaciones que podrían ganar popularidad en un futuro cercano. Un ejemplo de esto es el uso de interfaces cerebro-máquina en juegos por computadora. Actualmente, existen productos comerciales como cascos con electrodos para uso doméstico, que los usuarios pueden emplear con juegos clásicos como Pinball, Spaceship o Tetris. Otro campo prometedor es el de los juegos inmersivos en realidad virtual. Aunque aún no se han logrado avances significativos en este ámbito, se espera que se produzcan desarrollos importantes en los próximos años (Lotte et al., 2012).
El uso de BCIs en juegos no se limita al ámbito recreativo. Se ha demostrado que esta tecnología, cuando se aplica a juegos conocidos como Serious Games, puede ser beneficiosa para pacientes con desórdenes neurológicos como la epilepsia o el déficit de atención (Coenen et al., 2020).
Desafíos tecnológicos
A pesar de que la tecnología de las interfaces cerebro-máquina ha avanzado rápidamente en las últimas décadas, ofreciendo hoy en día una amplia gama de sensores y paradigmas BCI, todavía existen limitaciones tecnológicas que han impedido su adopción masiva. En esta sección, se examinan algunos de los principales desafíos que enfrenta este campo y se exploran las direcciones de investigación en las que se intenta avanzar.
Métodos invasivos versus no-invasivos:
Los métodos invasivos ofrecen la mejor alternativa para detectar patrones cerebrales con alta resolución espacial y temporal, pero su uso conlleva riesgos significativos asociados a la intervención quirúrgica, como infecciones, inflamaciones y daños colaterales. Por otro lado, el método no invasivo EEG es completamente inocuo para la salud, pero proporciona señales débiles y contaminadas con ruido, lo que limita su aplicación en tareas complejas de BCI. Un gran desafío actual es mejorar los materiales utilizados en los sensores para facilitar su implantación y reducir los riesgos para la salud. En este sentido, recientemente se ha propuesto un innovador tipo de electrodo que, en lugar de colocarse directamente en la corteza cerebral, se inserta en un vaso sanguíneo del cerebro, similar a un stent, permitiendo capturar la actividad eléctrica de las neuronas desde allí (Mitchell et al., 2023).
Paradigmas BCI multimodales:
Por otro lado, se sigue trabajando en el desarrollo de nuevos paradigmas BCI que sean más efectivos al utilizar señales no invasivas de EEG. Un ejemplo reciente es un paradigma multimodal en el que, además de imaginar movimientos, el usuario debe simultáneamente imaginar la lectura o escritura de un carácter chino. Este enfoque ha demostrado ser más robusto que el uso exclusivo de la Imaginación Motora (Tong et al., 2023). Otro método multimodal, propuesto en el contexto de la comunicación entre una persona y un robot (Tan et al., 2021), combina señales EEG con expresiones faciales del usuario. Esto permite al sistema BCI detectar el estado emocional del sujeto, identificando estados como miedo, felicidad, tristeza y neutralidad.
Entrenamiento de sistemas BCI con datos ruidosos, incompletos o escasos:
Como se mencionó anteriormente, un problema común en los sistemas BCI que utilizan EEG es la presencia de ruido, que dificulta la decodificación precisa de los comandos. Se han desarrollado diversas técnicas para mitigar estos ruidos, que van desde métodos clásicos de filtrado hasta el uso de Análisis de Componentes Independientes (ICA) (Croft & Barry, 2000) y otros enfoques. Recientemente, se ha propuesto un algoritmo innovador para eliminar artefactos generados por la actividad muscular, basado en la descomposición en modos empíricos serializada (Serialization-Based Ensemble Empirical Mode Decomposition) (Dai et al., 2021).
Otro problema común en aplicaciones de EEG es que los conjuntos de datos de entrenamiento a menudo están incompletos, ya sea debido a interferencias externas que inutilizan parte del registro o a la desconexión de algunos electrodos durante la captura de datos. En tales casos, es habitual descartar los datos incompletos. Sin embargo, dado que los datos suelen ser escasos y costosos de obtener, una alternativa más eficaz es intentar reparar los datos mediante un proceso conocido, en inglés, como “data completion”. En este contexto, las técnicas de procesamiento de señales tensoriales han demostrado ser especialmente útiles (Solé-Casals et al., 2018; Duan et al., 2021).
Una limitación importante en los métodos AI que en particular se aplica a los clasificadores modernos usados en BCI es que requieren de bases de datos voluminosas para poder ser entrenados correctamente. Este problema puede ser resuelto, o alivianado, generando datos artificiales en base a los pocos datos disponibles. La generación de datos artificiales que conserven las características de los originales es un gran desafío que ha sido resuelto en aplicaciones de visión por computadora ya que las imágenes admiten transformaciones (rotaciones, cambio de escala, etc.) que logran conservar las propiedades del conjunto de datos. En este contexto, en nuestro trabajo reciente (Caiafa et al., 2021) se presentaron métodos para la generación de datos EEG artificiales destinados al entrenamiento de clasificadores BCI.
Conclusiones
Aunque las interfaces cerebro-máquina (BCI) comenzaron a desarrollarse hace ya casi 50 años, su evolución fue bastante lenta hasta hace unos 10 o 15 años. Recientemente, esta tecnología ha experimentado un gran impulso gracias a importantes inversiones privadas, avances en biotecnología y la mejora en los algoritmos de inteligencia artificial, que han permitido decodificar patrones complejos de la actividad neuronal.
Actualmente, existe una intensa competencia comercial por ofrecer soluciones BCI a gran escala. Sin embargo, las opciones más eficientes disponibles son las que utilizan sensores implantados en la corteza cerebral. Estas soluciones, aunque efectivas, conllevan un alto costo y riesgos significativos para la salud debido a la necesidad de intervenciones quirúrgicas complejas, limitando su acceso a un segmento muy reducido del mercado.
Para que las BCIs puedan alcanzar una adopción masiva, es esencial que se desarrollen sistemas no invasivos, como los basados en EEG. No obstante, estos sistemas en la actualidad enfrentan grandes limitaciones en términos de calidad de las señales registradas, lo que dificulta la decodificación de patrones complejos de una manera efectiva.
Recientemente, la tecnología BCI ha captado la atención de los medios de comunicación, especialmente tras la publicación de un video en la red social X por parte de Neuralink, la compañía dirigida por Elon Musk. En el video, se muestra a un paciente con parálisis jugando al ajedrez mediante un implante cerebral. Aunque estos resultados han impactado en la opinión pública, son similares a resultados documentados con anterioridad en revistas científicas revisadas por pares. Sin embargo, gracias a las grandes inversiones destinadas a estos desarrollos, seguramente seamos testigos de avances significativos en poco tiempo.
El propósito de este artículo es ofrecer una visión integral sobre la evolución y el estado actual de las tecnologías de BCI, con el fin de comprender los desafíos tecnológicos asociados al desarrollo de futuras interfaces. Dado el dinamismo de este campo, seguramente seremos testigos de anuncios sensacionalistas sobre nuevos avances, y es fundamental tener una perspectiva clara para discernir entre progresos genuinos y promesas exageradas.
Bibliografía
- Berger, H. (1929). Ueber das Elektroenkephalogramm des Menschen, Archiv für Psychiatrie und Nervenkrankheiten, 87, 527-570.
- Brunner, P.; Ritaccio, A. L.; Emrich, J. F.; Bischof, H. & Schalk, G. (2011). Rapid communication with a “P300” matrix speller using electrocorticographic signals (ECoG), Frontiers in Neuroscience, 5.
- Caiafa, C. F. & Pestilli, F. (2017). Multidimensional encoding of brain connectomes, Scientific reports, 7 (1), 11491.
- Caiafa, C. F.; Sun, Z.; Tanaka, T.; Marti-Puig, P. & Solé-Casals, J. (2020) Decomposition Methods for Machine Learning with Small, Incomplete or Noisy Datasets, Applied Sciences, 10(23), 8481.
- Chao, Z.; Nagasaka, Y. & Fujii, N. (2010). Long-Term Asynchronous Decoding of Arm Motion Using Electrocorticographic Signals in Monkeys, Frontiers in Neuroengineering, 3 (3).
- Chen, X.; Teng, X.; Chen, H.; Pan, Y. & Geyer, P. (2024). Toward reliable signals decoding for electroencephalogram: A benchmark study to EEGNeX. Biomedical Signal Processing and Control, 87:105475.
- Cichocki, A.; Mandic, D.; Caiafa, C. F.; Phan, A-H.; Zhou, G.; Zhao, Q. & De Lathauwer, L. (2015). Tensor Decompositions for Signal Processing Applications. From Two-way to Multiway Component Analysis, IEEE Signal Processing Magazine, 32 (2) 145–163.
- Coenen, F.; Scheepers, F. E.; Palmen, S. J. M.; de Jonge, M. V. & Oranje, B. (2020). Serious Games as Potential Therapies: A Validation Study of a Neurofeedback Game, Clinical EEG and Neuroscience, 51(2), 87-93.
- Croft, R. J. & Barry, R. J. (2000). Removal of ocular artifact from the EEG: a review, Neurophysiologie Clinique/Clinical Neurophysiology, 30(1), 5–19.
- Dai, Y.; Duan, F.; Sun, A.; Zhang, Y.; Caiafa, C. F.; Marti-Puig, P. & Solé-Casals, J. (2001). A Fast Approach to Removing Muscle Artifacts for EEG with Signal Serialization Based Ensemble Empirical Mode Decomposition, Entropy, 23(1170).
- Demir, A. F.; Arslan, H. & Uysal, I. (2019). Bio-Inspired Filter Banks for Frequency Recognition of SSVEP-Based Brain–Computer Interfaces, IEEE Access, 7, 160295-160303.
- Duan, F.; Jia, H.; Zhang, Z.; Feng, F.; Tan, Y.; Dai, Y.; Cichocki, A.; Yang, Z.; Caiafa, C. F.; Zhe, S.; Solé-Casals, J. (2021). On the Robustness of EEG Tensor Completion Methods, SCIENCE CHINA Technological Sciences, 64.
- Farwell, L. A. & Donchin, E. (1988). Talking off the top of your head: toward a mental prosthesis utilizing event-related brain potentials, Electroencephalography and Clinical Neurophysiology, 70, 510–523.
- Fernández, E.; Greger, B.; House, P. A.; Aranda, I.; Botella, C.; Albisua, J.; Soto-Sánchez, C.; Alfaro, A. & Normann, R. A. (2014). Acute human brain responses to intracortical microelectrode arrays: challenges and future prospects, Front Neuroeng., 7:24.
- Fields, R. D. (2008). White Matter Matters, Scientific American, March 1.
- Hawkins, J.; Ahmad S. (2016). Why Neurons Have Thousands of Synapses, a Theory of Sequence Memory in Neocortex, Frontiers in Neural Circuits, 10.
- Hochberg, L. R.; Serruya, M. D.; Friehs, G. M.; Mukand, J. A.; Saleh, M.; Caplan, A. H.; Branner, A.; Chen, D.; Penn, R. D. & Donoghue, J. P. (2006) Neuronal ensemble control of prosthetic devices by a human with tetraplegia, Nature, 442(7099):164-71.
- Jia, H.; Sun, Z.; Duan, F.; Zhang, Y.; Caiafa, C. F. & Solé-Casals, J. (2022). Improving pre-movement pattern detection with filter bank selection, Journal of Neural Engineering, 19 (6).
- Jia, H.; Feng, F.; Caiafa, C. F.; Duan, F.; Zhang, Y.; Sun, Z. & Solé-Casals, J. (2023) Multi-class Classification of Upper Limb Movements with Filter Bank Task-related Component Analysis, IEEE Journal of Biomedical and Health Informatics, 27(8), 3867-3877.
- Jia, H.; Han, S.; Caiafa, C. F. ; Duan, F.; Zhang, Y.; Sun, Z. & Solé-Casals, J. (2024) Enabling temporal-spectral decoding in multi-class single-side upper limb classification; Engineering Applications of Artificial Intelligence, 133(Part E), 108473.
- Kamiya, J. (1968). Conscious control of brain waves, Psychology Today, 1(11), 56–60.
- Kawala-Sterniuk, A.; Browarska, N.; Al-Bakri, A.; Pelc, M.; Zygarlicki, J.; Sidikova, M.; Martinek, R. & Gorzelanczyk, E. J. (2021). Summary of over Fifty Years with Brain-Computer Interfaces—A Review. Brain Sciences, 11(1):43.
- Lawhern, V. J.; Solon, A. J.; Waytowich,N. R.; Gordon, S. M.; Hung, Ch. P. & Lance, B. J. (2018). EEGNet: a compact convolutional neural network for EEG-based brain–computer interfaces, Journal of Neural Engineering, 15:056013.
- Lotte, F.; Faller, J.; Guger, Ch.; Renard, Y.; Pfurtscheller, G.; Lécuyer, A. & Leeb, R. (2012). Combining BCI with Virtual Reality: Towards New Applications and Improved BCI. Practical Brain-Computer Interfaces, Biological and Medical Physics, Biomedical Engineering, Springer.
- McFarland, D. J.; Sarnacki, W. A.; Wolpaw, J. R. (2015). Effects of training pre-movement sensorimotor rhythms on behavioral performance, Journal of Neural Engineering, 12(6).
- Mitchell, P. et al. (2023). Assessment of Safety of a Fully Implanted Endovascular Brain-Computer Interface for Severe Paralysis in 4 Patients: The Stentrode With Thought-Controlled Digital Switch (SWITCH) Study, JAMA Neurology, 80(3), 270–278.
- Nam, C. S.; Nijholt, A. & Lotte, F. (2018). Brain-Computer Interfaces Handbook: Technological and Theoretical Advances, CRC Press.
- Ofner, P.; Schwarz, A.; Pereira, J.; Wyss, D.; Wildburger, R. & Müller-Putz, G. R. (2019). Attempted Arm and Hand Movements can be Decoded from Low-Frequency EEG from Persons with Spinal Cord Injury. Scitific Reports, 9 (7134).
- Panigrahi, N.; Mohanty, S. P. (2022). Brain Computer Interface: EEG Signal Processing, CRC Press.
- Portillo-Lara, R.; Tahirbegi, B.; Chapman, C. A. R.; Goding, J. A. & Green, R. A. (2021). Mind the gap: State-of-the-art technologies and applications for EEG-based brain–computer interfaces. APL Bioengineering, 5 (3): 031507.
- Pfurtscheller, G.; Flotzinger, D. & Kalcher, J. (1993). Brain–computer interface – A new communication device for handicapped persons, Journal of Microcomputer Application, 16, 293–299.
- Pichiorri, F.; Morone, G.; Petti, M.; Toppi, J.; Pisotta, I.; Molinari, M.; Paolucci, S.; Inghilleri, M.; Astolfi, L.; Cincotti, F. & Mattia, D. (2015) Brain–computer interface boosts motor imagery practice during stroke recovery, Annals of Neurology, 77(5), 851–865.
- Ramoser, H.; Muller-Gerking, J. & Pfurtscheller, G. (2000). Optimal spatial filtering of single trial EEG during imagined hand movement, IEEE Transactions on Rehabilitation Engineering, 8 (4), 441–446.
- Silberstein, R. B.; Schier, M. A.; Pipingas, A.; Ciorciari, J.; Wood, S. R. & Simpson, D. G. (1990). Steady-State Visually Evoked Potential topography associated with a visual vigilance task, Brain Topography, 3, 337–347.
- Solé-Casals, J.; Caiafa, C. F.; Zhao, Q. & Cichocki, A. (2018) Brain-Computer Interface with Corrupted EEG Data: A Tensor Completion Approach, Cognitive Computation, 10, 1062–1074.
- Smith, E. E. (1934). Skylark of Valeron. Old Earth Books.
- Sporns, O. (2011). Networks of the brain. MIT Press.
- Tan, Y.; Sun, Z.; Duan, F.; Solé-Casals, J. & Caiafa, C. F. (2021). A multimodal emotion recognition method based on facial expressions and electroencephalography, Biomedical Signal Processing and Control, 70.
- Tong, J.; Xing, Z.; Wei, X.; Du, S.; Sun, Z.; Solé-Casals, J. & Caiafa, C. F. (2023). Towards improving motor imagery brain-computer interface using multimodal speech imagery, Journal of Medical and Biological Engineering, 43 216–226.
- Vidal, J. J. (1973). Toward direct brain–computer communication”, Annual Review of Biophysics and Bioengineering, 2, 157–180.
- Wandelt, S. K.; Bjånes, D. A.; Pejsa, K.; Lee, B.; Liu, C. & Andersen, R. A. (2024). Representation of internal speech by single neurons in human supramarginal gyrus, Natur Human Behaviour, 8(6):1136–1149.
- Wolpaw, J. R.; McFarland, D. J.; Neat, G. W. & Forneris, C. A. (1991). An EEG-based brain–computer interface for cursor control, Electroencephalography and Clinical Neurophysiology, 78, 252–259.
- Wolpaw, J. R.; Birbaumer, N.; McFarland, D. J.; Pfurtscheller, G. & Vaughan, T. M. (2002). Brain–computer interfaces for communication and control, Electroencephalography and Clinical Neurophysiology, 113, 767–791.
- Yu, Y.; Liu, Y.; Jiang, J.; Yin, E.; Zhou, Z. & Hu, D. (2018). An Asynchronous Control Paradigm Based on Sequential Motor Imagery and Its Application in Wheelchair Navigation, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 26(12), 2367-2375.
- Zhang, Z.; Han, S.; Yi, H.; Duan, F.; Kang, F.; Sun, Z.; Solé-Casals, J. & Caiafa, C. F. (2023). A Brain-Controlled Vehicle System Based on Steady State Visual Evoked Potentials, Cognitive Computation 15, 159–175.
- Zhao, Q.; Caiafa, C. F.; Mandic, D. P.; Chao, Z. C.; Nagasaka, Y.; Fujii, N.; Zhang, L. & Cichocki, A. (2013). Higher-Order Partial Least Squares (HOPLS): A Generalized Multi-Linear Regression Method, IEEE Trans. on Pattern Analysis and Machine Intelligence (PAMI), 35 (7).
- https://share.baptisthealth.com/difference-between-mri-and-fmri-scans/
- https://www.mpiwg-berlin.mpg.de/resrep00_01/Jahresbericht_2_5_section.html
- https://www.researchgate.net/figure/EEG-registration-by-Hans-Berger-from-1928-one-year-before-his-first-publication-about_fig5_216212254
- https://www.gtec.at
- https://ai.meta.com/blog/brain-ai-image-decoding-meg-magnetoencephalography/
- https://neuralink.com
- https://synchron.com
- https://www.motifneuro.tech
- https://www.paradromics.com
- https://blackrockneurotech.com
- https://www.reuters.com/business/healthcare-pharmaceuticals/neuralink-shows-first-brain-chip-patient-playing-online-chess-2024-03-21/
- https://www.gtec.at/product/recoverix-pro-neurotechnology